

7.6. Синтез избирательной системы управления
Избирательной системой управления называется система, выбирающая одну из возможных комбинаций выходных сигналов в зависимости от значений входных сигналов.
Примером является система управления контрольно – сортировочным автоматом, который измеряет изделия и в зависимости от результатов измерения сортирует изделия на три группы (рис. 7. 9).

Рис. 7.9. Схема системы управления сортировочным автоматом
Таблица 7.2
Состояния |
|
x1 |
x2 |
f1 |
f2 |
f3 |
1 |
1 |
1 |
1 |
0 |
0 |
|
2 |
1 |
0 |
0 |
1 |
0 |
|
3 |
0 |
0 |
0 |
0 |
1 |
Размеры изделия измеряются с помощью проходного и непроходного калибров. При прохождении калибров через диаметр изделия они нажимают выключатели, создавая сигналы x1 и x2. Если проходят оба калибра, изделие бракуется – соответствующие входные сигналы x1 = 1 и x2 = 1. Если прошел проходной калибр и не прошел непроходной, деталь годна, соответствующие сигналы x1 = 1 и x2 = 0. Если деталь не прошла обе скобы, она возвращается на дополнительную обработку, соответствующие сигналы x1 = 0 и x2 = 0.
Эти условия представляют программу действия системы управления механизмов М1, М2, М3, производящих соответствующее адресование изделий, и могут быть представлены в виде таблицы состояний
Выходные сигналы, формируемые системой управления, обозначены f1, f2, f3. В первом состоянии входных сигналов, определяющих брак, Выходным сигналом f1 должен включаться механизм М1. Механизмы М2 и М3 должны быть включены, т.е. f2 = 0, f3 = 0. Подобным же образом определяются выходные сигналы в остальных состояниях.
Таблица 7.3
|
x1 |
x2 |
f2 |
f3 |
Брак |
1 |
1 |
0 |
0 |
Годен |
1 |
0 |
1 |
0 |
Возврат |
0 |
0 |
0 |
1 |
На основании таблицы состояний составим формулы включения, рассматривая выходные сигналы как логические произведения входных сигналов:
f1 = x1 x2 , f2 = x1 x2 , f3 = x1 x2 .
Упростим формулы включения. Из анализа таблицы состояний следует, что f1 в состояниях 1, 2, 3 принимает значения 1, 0, 0. Такие же значения в этих состояниях имеет и сигнал x2, тогда f1 = x2. Сигнал f3 равен инверсному сигналу x1. Функция f2 упрощению не поддается. Итак, после упрощений имеем
f1 = x2 , f2 = x1 x2 , f3 = x1 .
Следующий этап – построение структурной схемы (блок – схемы) системы управления, общей для логических элементов любых типов. Согласно формулам включения необходимо иметь два элемента повторения ДА, два элемента отрицания НЕ, один элемент умножения И.
Изображаем так называемый «черный ящик», проставляем входы в него x1, x2 и выходы f1, f2, f3, производим соединение входов и выходов согласно формулам включения (рис. 7.10).
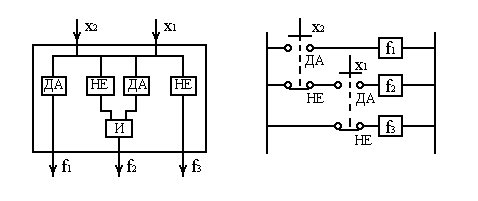
Рис. 7.10. Блок схема системы управления и ее реализация на электрических выключателях и электромагнитных реле
Реализация блок – схемы на электрических выключателях и электромагнитных реле представлена на рис. 7.10. Механизмы М1, М2 и М3 включаются от выходных электромагнитных реле.
Проверим правильность работы схемы: нажаты оба выключателя – включен механизм М1 – брак, нажат выключатель x1 и не нажат x2 – включен механизм М2 – изделие годно, оба выключателя не нажаты – включен механизм М3.
Контрольные вопросы
1.Какими признаками характеризуется машина-автомат?
2. Приведите примеры аналогового управления машинами- автоматами.
3. Как осуществляется числовое управление?
4. Что такое система управления по времени?
5. В чем состоит преимущество логической системы управления ?
6. На чем основано построение логических систем управления?
7. Что собой представляют логические элементы?
8. Приведите пример функционирования избирательной системы управления.