

Контрольные вопросы
Перечислите поколения устройств ЧПУ.
Как конструктивно реализуются УЧПУ на станке?
Назовите структуру обозначений моделей УЧПУ.
Перечислите основные характеристики моделей УЧПУ.
4.Задачи чпу
Устройство ЧПУ является управляющим по отношению к станку. В то же время оно само является объектом управления при взаимодействии с окружающей средой, в качестве которой выступает оператор, ЭВМ верхнего уровня и т.д. Если рассматривать с этих позиций задачи, которые оно должно решать, то можно выделить следующие задачи:
Геометрическая задача – взаимодействие УЧПУ со станком для управления формообразованием детали. Решение данной задачи заключается в отображении геометрической информации чертежа в совокупность таких движений рабочих органов станка, которые материализуют чертеж в изделие.
Логическая задача заключается в управлении дискретной электроавтоматикой, т.е. автоматизацией на станке вспомогательных операций (зажим инструмента, смена инструмента и т.д.).
Технологическая задача заключается в управлении рабочим процессом и достижении требуемого качества обработки деталей с меньшими затратами.
Терминальная задача заключается во взаимодействии УЧПУ с окружающей средой.
4.1. Геометрическая задача
Сущность геометрической задачи можно определить следующим образом: отобразить геометрическую информацию чертежа в совокупность таких формообразующих движений станка, которые материализуют чертеж в конечном изделии. Каждый станок имеет свой комплект электроприводов, расположенных согласно системе координат. Электроприводы расположены таким образом, чтобы обеспечить обработку деталей соответствующего класса, т.е. перемещения инструмента (или заготовки) вдоль направляющих.
Например, на станках токарной группы профиль детали формируется перемещением инструмента в одной плоскости, поэтому станки данной группы оснащены комплектом из двух приводов, осуществляющих перемещения инструмента вдоль продольных и поперечных направляющих.
Пример: Выборка колодца (рис. 4.1) по контуру производится на вертикально-фрезерном станке. Обработка контура обеспечивается совокупным движением детали по осям X и Y, закрепленной на столе станка. Вертикальное перемещение инструмента по оси Z отсутствует.
Обработка контура 1 производится фрезой 3, перемещаемой по траектории 4, эквидистантной к заданному контуру.
Разделим траекторию фрезы на элементарные участки, в качестве которых используются прямая и окружность (дуга окружности). В данном примере таких участков будет шесть: 1─2; 2 ─ 3; 3 ─ 4; 4 ─ 5; 5 ─ 6; 6 ─ 1. Точки 1 – 6 называются опорными или узловыми. Существует несколько определений опорных точек: два наиболее понятные из них: опорные точки − это точки, размещенные на стыке элементарных участков, опорные точки − это точки, в которых происходит изменение уравнения, описывающего линию.
Можно сказать, что программа управления станком для обработки дан- ного профиля будет состоять из отдельных фрагментов – кадров, каждый из которых содержит информацию, необходимую для обработки одного элементарного участка.
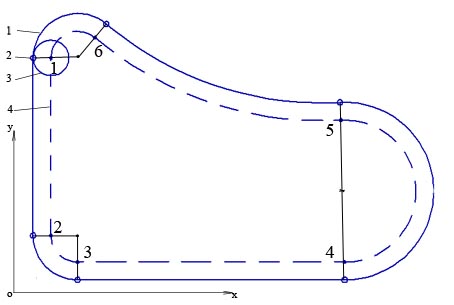
Рис. 4.1. Обработка контура на вертикально-фрезерном станке