

Глава 3. Теория пар сил на плоскости
3.1. Пара сил. Эквивалентность пар сил
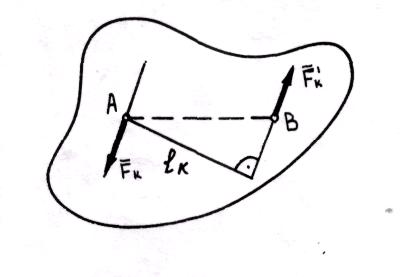
Система двух параллельных сил, равных по модулю и направленных в противоположные стороны, называется парой сил или просто парой. Понятие о паре сил ввел в механику французский ученый Луи Пуансон (1777-1859).
Пара сил – неуравновешенная система и не имеет равнодействующей. Пара сил производит на тело вращательное действие.
Вращательный эффект пары измеряется взятым со знаком плюс или минус произведением модуля одной из сил пары на ее плечо (момент пары), т.е.
![]() .
.
Знак «плюс» ставится перед числовым значением момента в том случае, если пара стремится повернуть тело против хода часовой стрелки, и знак «минус» если пара стремится повернуть тело по ходу часовой стрелки.
В
Международной системе единиц (СИ) моменты
пар выражаются в
![]() или
или
![]() .
.
Вращательное
действие расположенной в данной плоскости
пары зависит только от ее момента,
поэтому для задания пары сил достаточно
указать числовое значение ее момента,
а затем по данному или выбранному
плечу можно определить силы пары или
по силам подобрать необходимое плечо.
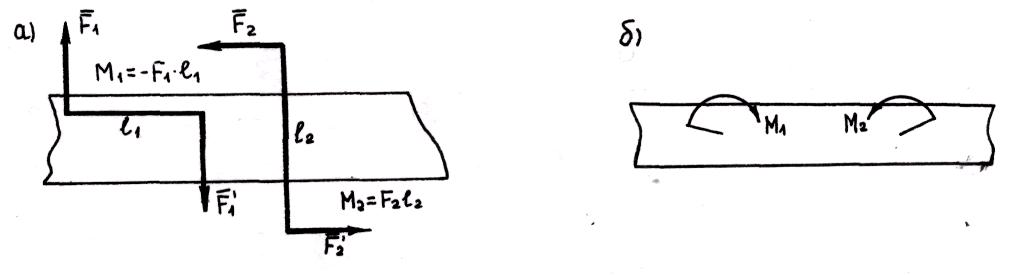
Исходя из этого, на рисунках и схемах
пары сил изображают иногда просто
круговой стрелкой, характеризующей
лишь направление вращающего действия.
Например, пары (![]() ) и (
) и (![]() ), приложенные к брусу, можно условно
изобразить круговыми стрелками, обозначив
их
), приложенные к брусу, можно условно
изобразить круговыми стрелками, обозначив
их
![]() и
и
![]() .
.
3.2. Сложение пар сил. Условие равновесия пар
Теорема: Система пар, действующих на тело в одной плоскости, эквивалентна паре сил с моментом, равным алгебраической сумме моментов пар системы.
Допустим,
на тело действуют три пары, моменты
которых
![]() известны.
известны.
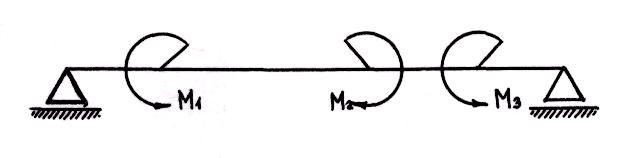
Момент равнодействующей пары:
![]() ,
,
![]()
Если
в результате сложения пар
![]() ,
то действующие на тело пары сил образуют
уравновешенную систему. Следовательно,
необходимое и достаточное условие
равновесия системы пар выражается одним
уравнением
,
то действующие на тело пары сил образуют
уравновешенную систему. Следовательно,
необходимое и достаточное условие
равновесия системы пар выражается одним
уравнением
![]() ,
,
т.е. для равновесия системы пар сил, действующих на тело в одной плоскости, необходимо и достаточно, чтобы алгебраическая сумма их моментов была равна нулю.
Значит, систему пар или одну пару можно уравновесить только парой.
3.3. Момент пары относительно точки
Задолго до появления понятия о паре сил и ее моменте в механике возникло понятие о моменте силы относительно точки. Первый, кто обратил внимание на важную роль в механике момента силы относительно точки, был Леонардо да Винчи (1452–1519), современную трактовку понятия момента силы относительно точки дал П. Вариньон (1654–1722).
Моментом силы относительно точки называется взятое со знаком «плюс» или «минус» произведение модуля силы на кратчайшее расстояние
от точки до линии действия силы, т.е.
![]()
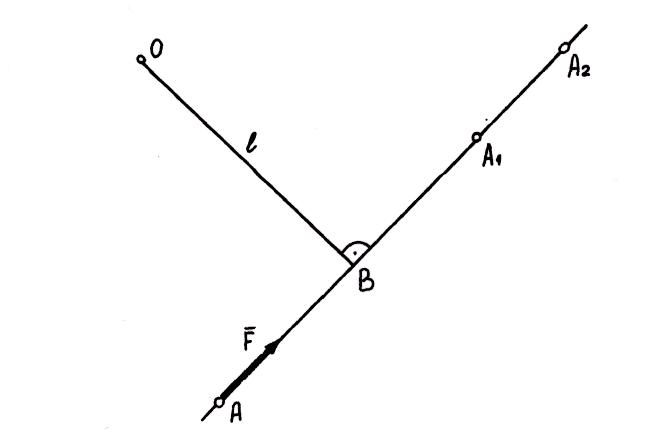
Точка 0, относительно которой берется момент силы, называется центром момента. OВ = l – кратчайшее расстояние от центра момента до линии действия силы - называется плечом силы относительно данной точки. Знак “плюс” ставится в случае, если сила F стремится повернуть тело против хода часовой стрелки, а знак “минус” – в противоположном случае (правило знаков то же, что и у моментов пар сил). Момент силы относительно точки 0 на рисунке положительный.