

Глава 6. Кинематика точки
6.1. Основные понятия кинематики
Раздел механики, занимающийся изучением движения материальных тел без учета их масс и действующих на них сил, называется кинематикой.
Движение – основная форма существования всего материального мира, покой и равновесие – частные случаи.
Всякое движение, и механическое в том числе, происходит в пространстве и во времени.
Все тела состоят из материальных точек. Чтобы получить правильное представление о движении тел, начинать изучение нужно с движения точки. Перемещение точки в пространстве выражается в метрах, а также в дольных (см, мм) или кратных (км) единицах длины, время – в секундах. В практике или жизненных ситуациях время часто выражают в минутах или часах. Отсчет времени при рассмотрении того или иного движения точки ведут от определенного, заранее обусловленного начального момента (t = 0).
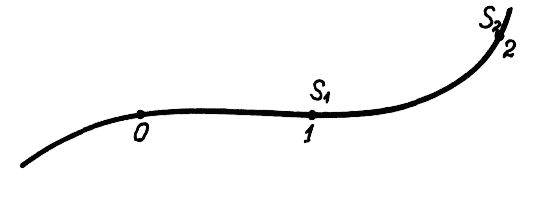
Геометрическое место положений движущейся точки в рассматриваемой системе отсчета называется траекторией. По виду траектории движение точки делится на прямолинейное и криволинейное. Траектория точки может быть определена и задана заранее. Так, например, траектории искусственных спутников Земли и межпланетных станций вычисляют заранее, или если принять движущиеся по городу автобусы за материальные точки, то их траектории (маршруты) также известны. В подобных случаях положение точки в каждый момент времени определяется расстоянием (дуговой координатой) S, т.е. длиной участка траектории, отсчитанной от некоторой ее неподвижной точки, принятой за начало отсчета. Отсчет расстояний от начала траектории можно вести в обе стороны, поэтому отсчет в одну какую-либо сторону условно принимают за положительный, а в
противоположную – за отрицательный, т.е. расстояние S – величина алгебраическая. Она может быть положительной (S > 0) или отрицательной (S<0).
При движении точка за определенный промежуток времени проходит некоторый путь L , который измеряется вдоль траектории в направлении движения.
![]() .
.
Если точка стала двигаться не из начала отсчета O, а из положения, находящегося на начальном расстоянии So то
![]()

Векторная величина, характеризующая в каждый данный момент времени направление и быстроту движения точки, называется скоростью.
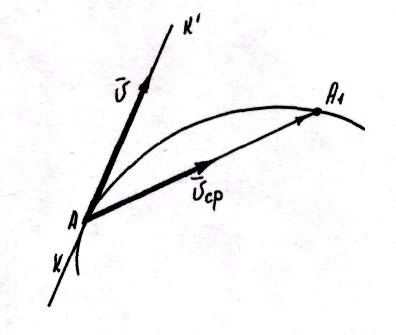
![]()
Скорость точки в любой момент ее движения направлена по касательной к траектории.
![]()
Отметим,
что это векторное равенство характеризует
лишь положение
![]() ,
а модуль средней скорости за время
,
а модуль средней скорости за время
![]() :
:
![]()
где
![]() –
путь, пройденный точкой за время
.
–
путь, пройденный точкой за время
.
Модуль средней скорости равен частному от деления пройденного пути на время, в течение которого этот путь пройден.
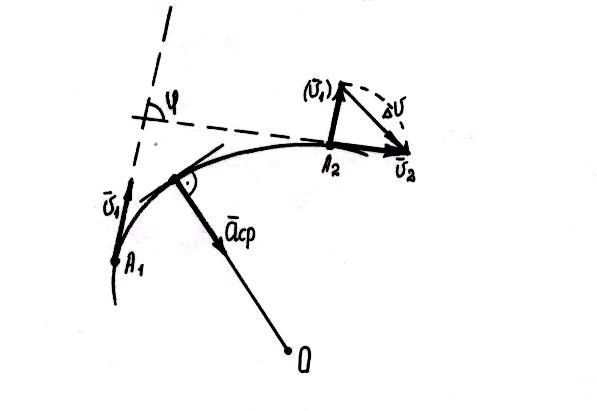
Векторная величина, характеризующая быстроту изменения направления и числового значения скорости, называется ускорением.
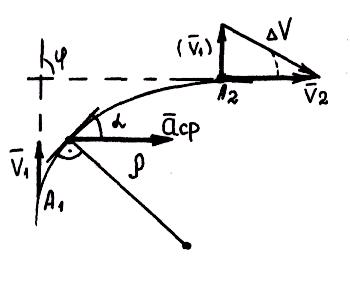
![]()
При равномерном движении по криволинейной траектории точка тоже имеет ускорение, так как и в этом случае изменяется направление скорости.
![]()
За
единицу ускорения принимают обычно
![]() .
.
6.2. Способы задания движения точки
Существует три способа: естественный, координатный, векторный.
Естественный способ задания движения точки. Если кроме траектории, на которой отмечено начало отсчета O, задана зависимость
![]()
между расстоянием S и временем t, это уравнение называется законом движения точки по заданной траектории.
Пример:
![]()
Пусть,
например, задана некоторая траектория,
движение точки по которой определяется
уравнением
![]() .
Тогда в момент времени
.
Тогда в момент времени
![]()
![]() ,
т.е. точка находится в начале отсчета
O;
в момент времени
,
т.е. точка находится в начале отсчета
O;
в момент времени
![]() точка находится на расстоянии
точка находится на расстоянии
![]() ;
в момент времени
;
в момент времени
![]() точка находится на расстоянии
точка находится на расстоянии
![]() от начала отсчета O.
от начала отсчета O.
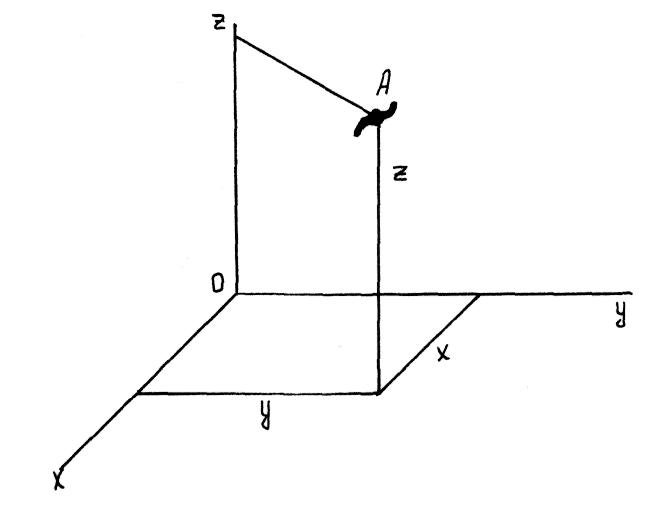
Координатный способ задания движения точки. Когда траектория точки заранее не известна, положение точки в пространстве определяется тремя координатами: абсциссой X, ординатой Y и аппликатой Z.
![]() или
или
![]() ,
исключив время.
,
исключив время.
Эти уравнения выражают закон движения точки в прямоугольной системе координат (OXYZ).
В
частном случае, если точка движется в
плоскости, закон движения точки выражается
двумя уравнениями:
![]() или
или
![]() .
.
Например.
Движение точки в плоской системе
координат задано уравнениями
![]() и
и
![]() (X
и Y
– см, t
– с). Тогда в момент времени
(X
и Y
– см, t
– с). Тогда в момент времени
![]() и
и
![]() ,
т.е. точка находится в начале координат;
в момент времени
координаты точки
,
т.е. точка находится в начале координат;
в момент времени
координаты точки
![]() ,
,
![]() ;
в момент времени
координаты точки
;
в момент времени
координаты точки![]() ,
,![]() и т.д.
и т.д.
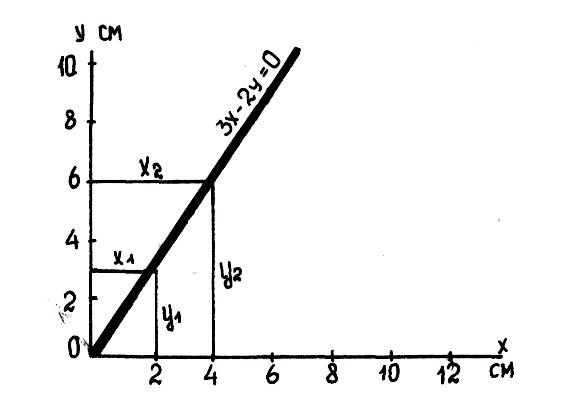
Зная закон движения точки в прямоугольной системе координат, можно определить уравнение траектории точки.
Например,
исключив время t
из заданных выше уравнений
и
,
получим уравнение траектории
![]() .
Как видим, в этом случае точка движется
по прямой, проходящей через начало
координат.
.
Как видим, в этом случае точка движется
по прямой, проходящей через начало
координат.