4.3. Теорема Вариньона
Непосредственно
из равенства (![]() )
вытекает важная зависимость между
моментом равнодействующей и моментами
составляющих сил, известная в механике
как теорема Вариньона. Перепишем
предыдущее равенство в таком виде:
)
вытекает важная зависимость между
моментом равнодействующей и моментами
составляющих сил, известная в механике
как теорема Вариньона. Перепишем
предыдущее равенство в таком виде:
![]()
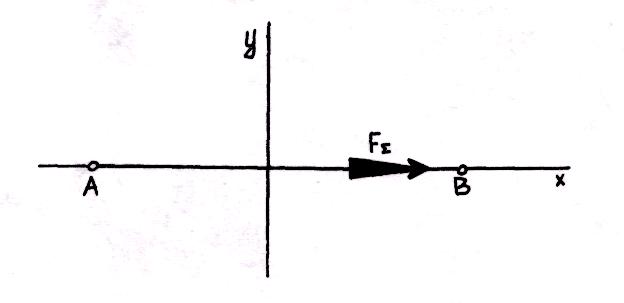
Из
последнего рисунка следует, что
![]() – момент равнодействующей относительно
любой точки, а по формуле
– момент равнодействующей относительно
любой точки, а по формуле
![]() ,
поэтому последнее равенство можно
переписать в виде
,
поэтому последнее равенство можно
переписать в виде
![]() ,
,
т.е. момент равнодействующей ПСПРС относительно любой точки равен алгебраической сумме моментов сил системы, взятых относительно той же точки.
4.4. Уравнения равновесия и их различные формы
Первая форма уравнений равновесия.
![]()
Если плоская система сил уравновешена, то алгебраические суммы проекций всех сил на оси X и Y равны нулю, а также равна нулю алгебраическая сумма моментов всех сил относительно любой точки.
Уравнений равновесия три, т.е. в произвольной плоской уравновешенной системе число неизвестных сил не должно превышать трех.
Вторая форма уравнений равновесия.
![]()
Если произвольная плоская система сил уравновешена, то алгебраические суммы моментов сил относительно двух любых точек, а также алгебраическая сумма проекций сил на ось, не перпендикулярную прямой, проходящей через эти точки, равны нулю.
Третья форма уравнений равновесия.
![]()
Если произвольная плоская система сил уравновешена, то алгебраические суммы моментов сил относительно любых трех точек, не лежащих на одной прямой, равны нулю.
Частные случаи решения этого уравнения:
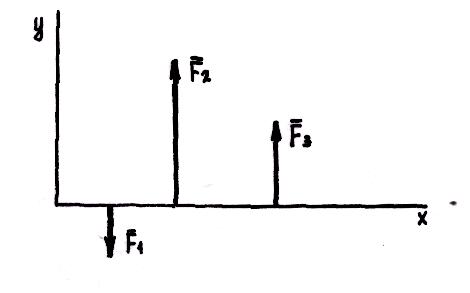
1. К телу может быть приложена уравновешенная система параллельных сил, тогда, рационально расположив оси координат (например, ось X – перпендикулярно силам, а ось Y – параллельно им) получим
![]()
Если плоская система параллельных сил уравновешена, то алгебраическая сумма проекций сил на ось, параллельную силам, и алгебраическая сумма моментов сил относительно любой точки равны нулю.
2. Расположив центры моментов A и В на прямой, перпендикулярной направлениям сил, получим
![]()
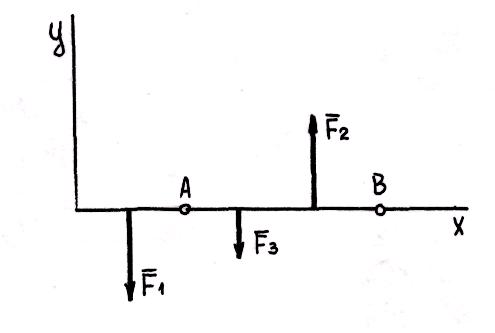
Если плоская система параллельных сил уравновешена, то равны нулю алгебраические суммы моментов сил относительно двух любых точек, лежащих на прямой, не параллельной линиям действия сил.
Для плоской системы параллельных сил получим два уравнения равновесия, т.е. для того, чтобы задача могла быть решенной, число неизвестных сил должно быть не больше двух. Вообще говоря, все задачи на равновесие системы сил, в которых число неизвестных не превосходит числа уравнений статики для этой системы, называются статически определимыми. Если же число неизвестных сил превышает число уравнений статики, которые возможно составить для данной системы, то задача называется статически неопределимой.
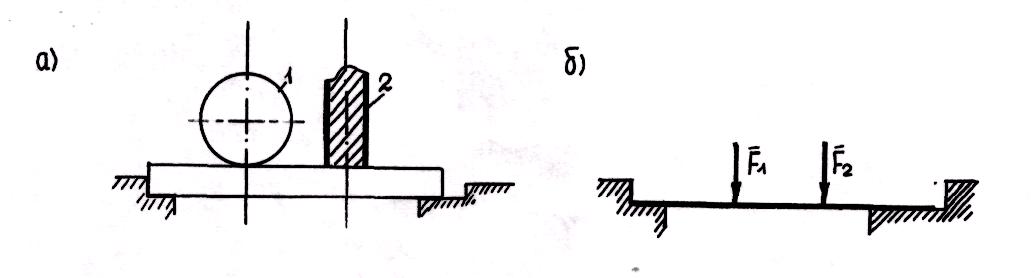
4.5. Балочные системы. Разновидности опор и виды нагрузок
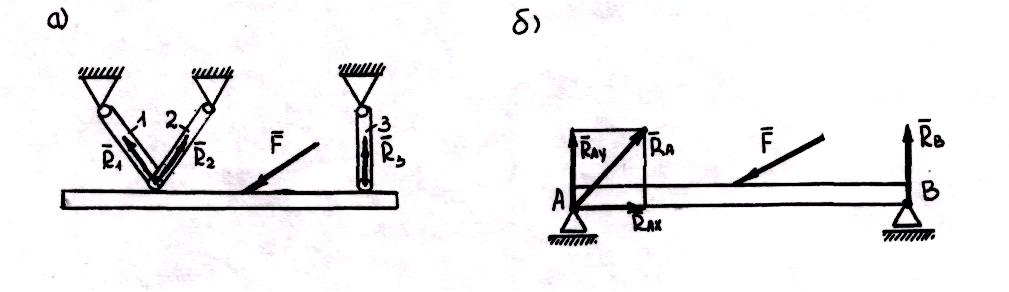
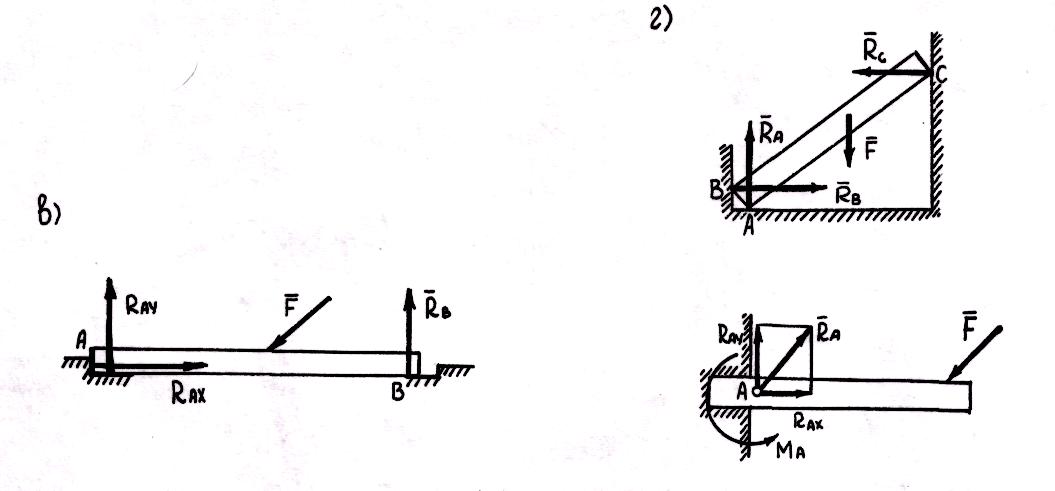
Жесткая заделка
(Ма –момент, препятствующий повороту балки)
Объектом решения многих задач статики служат так называемые балки или балочные системы. Балкой называется конструктивная деталь какого-либо сооружения, выполняемая в большинстве случаев в виде прямого бруса с опорами в двух (или более) точках.
По способу приложения силы условно делятся на сосредоточенные и распределенные.
1. Сосредоточенные силы. Предполагается, что нагрузка сосредоточена в точке.