

Получение графического изображения реакции сау при последовательностях единичного ступенчатого, импульсного и гармонического сигналов.
Для выполнения данного пункта расчетно-графической работы воспользуемся интегрированной в MatLab средой Simulink.
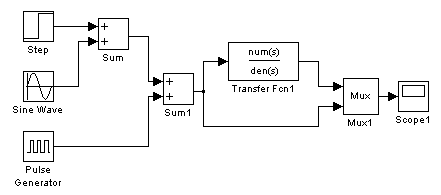
Рис. 14. Определение реакции САУ на последовательность входных сигналов в Simulink.
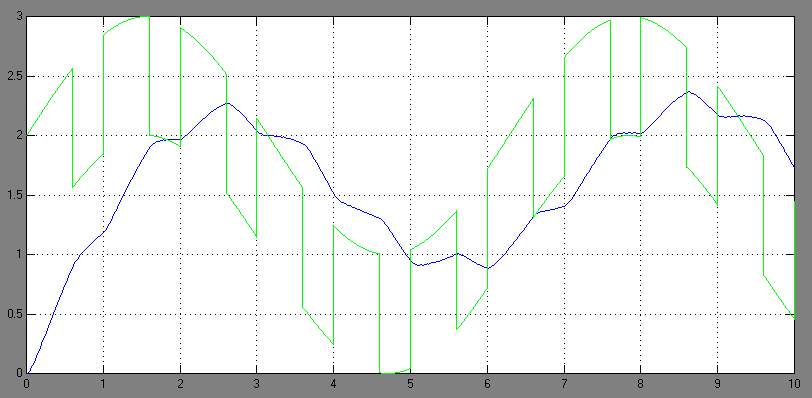
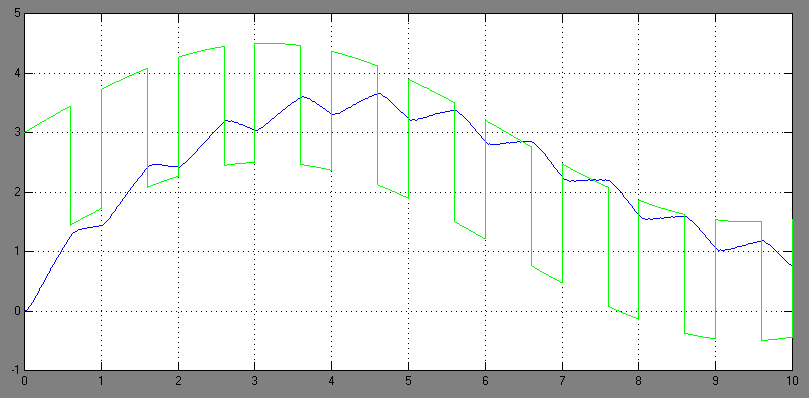
Изменим числовые параметры входных сигналов и определим реакцию САУ.
Анализ-заключение по результатам работы.
В данной расчетно-графической работе исследовался электромеханический привод промышленного манипулятора.
При выполнении работы были применены знания в области теории автоматического управления и высшей математики для математического описания и исследования САУ. Так же был освоен метод моделирования для исследования динамики электромеханического привода промышленного манипулятора.
Согласно заданию на расчетно-графическую работу были решены следующие задачи:
разработка фазовой математической модели линейной САУ методами пространства состояний;
исследование модели на устойчивость, управляемость и наблюдаемость;
разработка цифровой модели САУ по заданной структурной схеме и передаточным функциям звеньев;
получение графического изображения реакции САУ на различные входные сигналы;
определение основных параметров качества функционирования системы.
В результате выполнения расчетно-графической работы были определены:
модель в пространстве состояний исследуемой САУ;
фробениусова каноническая форма уравнений состояний и граф системы по фробениусовой канонической форме;
жорданова каноническая форма уравнений состояний и граф системы по жордановой канонической форме.
Используя данные канонические формы и графы системы, было выявлено, что система является устойчивой, частично управляемой и полностью наблюдаемой.
Пользуясь моделью в пространстве состояний исследуемой САУ, мной была разработана программа для имитационного моделирования системы. В ней применяется метод численного интегрирования Рунге-Кутта II порядка. Сравнение результатов функционирования составленной программы и интегрированной в систему MatLab среды Simulink, позволяет сделать вывод, что составленная программа работает правильно.
Таким образом, в результате выполнения данной расчетно-графической работы мной были получены и углублены знания по получению моделей системы в пространстве состояний; по определению устойчивости, управляемости и наблюдаемости системы; по применению метода моделирования для исследования САУ.
Список используемой литературы
Асанов А.З. Метод пространства состояний в задачах анализа динамических систем.–Набережные Челны: Изд-во КамПИ, 1992.
Асанов А.З. Цифровое моделирование и анализ динамических систем.– Набережные Челны: Изд-во КамПИ, 2004.
Ахмадеев. И.А. Использование системы MatLAB для исследования систем управления.–Набережные челны: Изд-во КамПИ, 2002.
Лазарев Ю. Начала программирования в среде MatLAB: Учебное пособие.– Киев: Изд-во
НТУУ "КПИ", 2003.
Вальвачев А.Н. Программирование на языке Delphi.– Минск: Изд-во ООО «Попурри», 1997.
Макаров Е.Г. Самоучитель MathCad 14.– М.: Изд-во «Новый Диск», 2008.