

Получение эквивалентной передаточной функции системы.
Используем систему MatLab (Matrix Laboratory).
Для того чтобы определить передаточную функцию системы ее необходимо привести к одноконтурному виду. Для этого используются правила структурных преобразований.
Если имеется структурная схема, которую нужно преобразовать к одноконтурному виду, то основные правила таких преобразований следующие:
Если имеется цепочка из последовательно соединенных звеньев, то эквивалентная передаточная функция такой цепочки равна произведению передаточных функций, входящих в эту цепочку.
Если звенья соединены параллельно, то эквивалентная передаточная функция такой цепочки равна сумме передаточных функций, входящих в цепочку.
Если звено с передаточной функцией
 охвачено обратной связью с передаточной
функцией
охвачено обратной связью с передаточной
функцией
 ,
то эквивалентная передаточная функция
такой связки определяется по
следующей формуле:
,
то эквивалентная передаточная функция
такой связки определяется по
следующей формуле:
В данной формуле знак «+» соответствует отрицательной обратной связи, а знак «–» - положительной.
Система MatLab представляет собой интерактивную компьютерную систему для выполнения инженерных и научных расчетов, ориентированную на работу с массивами данных. Для нахождения передаточной функции системы нам понадобятся следующие команды:
»W1 2= W1*W2 – преобразование последовательного соединения звеньев;
»W1 2= W1+W2 – преобразование параллельного соединения звеньев;
» feedback – преобразование встречно-параллельного соединения звеньев.
» W1=tf([4],[0.001 1]);
» W2=tf([0.24 12],[1 0]);
» W3=tf([6],[0.005 1]);
» W4=tf([5],[0.04 1]);
» W5=tf([1],[0.006 0]);
» W6=tf([1],[65 0]);
» W7=0.3;
» W8=0.07;
» W457 = feedback(W4*W5,W7);
» W234578 = feedback(W2*W3*W457,W8);
» Wsystem = feedback(W1*W234578*W6,1)
Transfer function:
 28.8
s + 1440
28.8
s + 1440
7.8e-008 s^6 + 9.555e-005 s^5 + 0.01843 s^4 + 1.008 s^3 + 131.9 s^2 + 1667 s + 1440
Используем систему MathCAD.
MathCAD – это специфический язык программирования, который позволяет облегчить решение математических уравнений. Для нахождения передаточной функции в системе MathCAD, необходимо воспользоваться следующим уравнением:

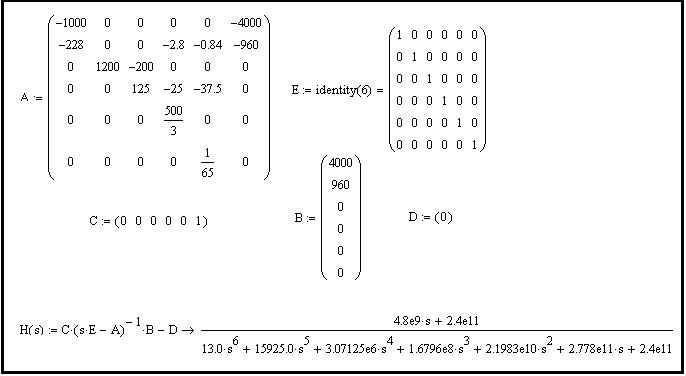
Рис. 3. Получение передаточной функции в системе MathCAD
Преобразуем
получившееся выражение, умножив числитель
и знаменатель передаточной функции на
 .
Тогда передаточная функция системы
запишется следующим образом:
.
Тогда передаточная функция системы
запишется следующим образом:

Эта передаточная функция полностью совпадает с передаточной функцией, полученной в системе MatLab.
Таким образом, эквивалентная передаточная функция исследуемой системы имеет следующий вид:

Определение фробениусовой канонической формы уравнений состояния.
Любое
звено динамической системы может быть
описано с помощью одного дифференциального
уравнения. Однако одной и той же
передаточной функции может соответствовать
множество структур моделей. Отсюда
вытекает необходимость выбора наиболее
рациональной модели при математическом
описании динамических систем. На практике
отдают предпочтение так называемым
каноническим формам. С инженерной точки
зрения канонические
формы
– это модели исходной системы, отличающиеся
простотой математического описания и
регулярной структурой. Это обеспечивается
переходом от исходного описания с
помощью замены переменных к такой
системе координат, что большинство
элементов матриц в
новой системе координат становятся
равными нулю или единице.
в
новой системе координат становятся
равными нулю или единице.
Наиболее распространенными в практике каноническими формами являются:
каноническая форма Фробениуса;
каноническая форма Жордана.
Наибольший
интерес представляют канонические
формы, при которых структура матриц
 имеет наиболее простой вид. Причем, при
приведении уравнений к канонической
форме простую структуру принимают две
матрицы из трех:
имеет наиболее простой вид. Причем, при
приведении уравнений к канонической
форме простую структуру принимают две
матрицы из трех:
матрицы
 управляемые канонические формы;
управляемые канонические формы;матрицы
 наблюдаемые канонические формы.
наблюдаемые канонические формы.
Основу реализации фробениусовой канонической формы составляет цепочка последовательно включенных интеграторов, охваченных обратными связями, причем, коэффициенты обратных связей совпадают с коэффициентами характеристического полинома динамической системы.
Для формирования уравнения состояния во фробениусовой канонической форме, необходима передаточная функция исследуемой системы:
Здесь

Запишем дифференциальное уравнение исследуемой системы:


 Произведем
следующие замены:
Произведем
следующие замены:


Пусть




 ;
;
 .
.
Тогда из уравнения (16) следует, что



Таким образом,


Из уравнения (17) следует, что

Объединим получившиеся дифференциальные уравнения и уравнение выхода (16) в систему
Матричная запись этих уравнений имеет следующий вид:
 (21)
(21)
Полученная форма уравнений состояния носит название фробениусовой канонической формы.
Построим
граф, соответствующий данной канонической
форме. Графы используются для наглядного
изображения зависимостей в САУ. Граф –
это условное графическое изображение
системы уравнений. Граф представляет
собой совокупность вершин (узлов) и
соединяющих их ветвей (дуг) с обозначением
направления передачи сигналов и их
пропускной способности. В данном случае
вершинами графа являются переменные
 входной
сигнал
входной
сигнал
 ,
выходной сигнал
,
выходной сигнал
 Связи между переменными изображаются
в виде дуг с проставленными коэффициентами
при переменных и направлениями передачи
сигнала.
Связи между переменными изображаются
в виде дуг с проставленными коэффициентами
при переменных и направлениями передачи
сигнала.





Рис. 4. Граф системы для фробениусовой канонической формы.