

Розділ 5 оптимальне планування і координація управління виробництвом в нечітких умовах
5.1 Методи вирішення задач планування в нечітких умовах
Серед питань, що вирішуються при розробці автоматизованих систем управління, проблема побудови адекватної моделі планування і вибору прийнятних алгоритмів рішення є одна з найважливіших і найскладніших. Важливість цього питання походить з того факту, що від правильної побудови моделі і вибору ефективного алгоритму рішення задачі планування залежить нормальне функціонування виробництва.
Планування виробничої програми промислового підприємства здійснюється, як правило, в умовах неточності початкової інформації, коли деякі системні параметри визначаються недостатньо точно, що породжує невизначеність умов планування. Часто цю невизначеність не можна розглядати як стохастичне явище, оскільки відсутні стохастичні параметри і вона може характеризуватися швидше нечіткими категоріями, залежними від кількості і якості сировини, термінів його постачання; функціонування технологічних установок (зокрема, пов’язаною з можливими змінами коефіцієнтів залучення і відбору); термінів початку і кінця ремонтних робіт; втрат продуктів, неточності датчиків і так далі.
У зв’язку з вищезгаданим виникає інтерес до теорії нечітких множин для вирішення завдань планування. В даний час накопичений певний досвід [29 – 43], в якому можна виділити два напрями:
застосування нечіткої логіки [5, 10, 29, 30, 32, 34, 43];
застосування нечіткого лінійного програмування [9, 18, 31 – 33, 35-42].
Застосування
нечіткої логіки засноване на наступному.
Множина входів А
і
виходів В
системи
розбиваються на підмножини
![]() і
і
![]() що описуються лінгвістичними термами
малий,
середній,
великий
і
так далі. Між ними встановлюються бінарні
нечіткі відносини
що описуються лінгвістичними термами
малий,
середній,
великий
і
так далі. Між ними встановлюються бінарні
нечіткі відносини
![]() ,
які визначаються
як:
,
які визначаються
як:
![]() (5.1)
(5.1)
На основі правила композиційного виводу можна, знаючи вхід системи, визначити значення на виході:
![]() .
(5.2)
.
(5.2)
У
[29] розглядається завдання планування
виробництва з безперервною технологією,
в якій елементи вектора обмежень на
виробничі ресурси
![]() є
нечіткими і задані у вигляді інтервалів
є
нечіткими і задані у вигляді інтервалів
![]() .
На
універсальній множині
будують нечіткі підмножини, що описуються
первинними лінгвістичними термами
малий,
середній,
великий
і
так далі з відповідними функціями
приналежності. Потім, використовуючи
положення нечіткої логіки вигляду
IFATHENB
і правила композиційного виводу, шукають
рішення поставленої задачі. Це рішення
представляється ЛПР, і той приймає його
або змінює пріоритет окремих обмежень
і вирішує задачу наново.
.
На
універсальній множині
будують нечіткі підмножини, що описуються
первинними лінгвістичними термами
малий,
середній,
великий
і
так далі з відповідними функціями
приналежності. Потім, використовуючи
положення нечіткої логіки вигляду
IFATHENB
і правила композиційного виводу, шукають
рішення поставленої задачі. Це рішення
представляється ЛПР, і той приймає його
або змінює пріоритет окремих обмежень
і вирішує задачу наново.
У [32] розглянуто багатокритеріальне завдання планування роботи гідротермальної енергетичної станції з обмеженнями на ввідні ресурси і трьома цільовими функціями: мінімізація витрат, повне використання виробленої енергії, стабілізація рівня в резервуарах. На підставі лінгвістичної інформації, отриманої від ЛПР, безліч значень контрольованих параметрів розбиваються на підмножини, що описуються лінгвістично, і на основі нечіткої логіки визначають «чинники зміни ваг», а потім вирішують задачу скалярної оптимізації. В ході діалогу з ЛПР послідовно змінюються ці ваги і задачу вирішують наново до тих пір, поки цільові функції не приймуть задовільні значення ЛПР.
У [43] вирішується завдання управління запасами. На підставі наявної інформації будують функції приналежності нечітких цілей і обмежень і ведуть пошук такого рішення, яке максимізувало функцію приналежності перетину множини цілей і множини обмежень.
Застосування даного підходу вельми зручне і перспективне, проте збільшення розмірності системи веде до ускладнення і трудності реалізації даного алгоритму.
Зупинимося на деяких підходах до вирішення завдань планування на основі нечіткого лінійного програмування (НЛП).
Нечітка модель завдання планування може бути записана у вигляді:
![]() (5.3)
(5.3)
де
F
– цільова функція; C
– вектор цін;
![]() – вектор iнтен-сивностi
технологічних способів виробництва; А
– матриця технологічних коефіцієнтів;
В
–
вектор-стовпець виробничих ресурсів;
~ – означає нечіткість.
– вектор iнтен-сивностi
технологічних способів виробництва; А
– матриця технологічних коефіцієнтів;
В
–
вектор-стовпець виробничих ресурсів;
~ – означає нечіткість.
У [35 – 36] розглядається модель:
![]() (5.4)
(5.4)
де
![]() –
деяке бажане для ЛПР значення цільової
функції.
–
деяке бажане для ЛПР значення цільової
функції.
Далі
будують лінійні функції приналежності
![]() що
відображають ступінь виконання і-го
обмеження у вигляді:
що
відображають ступінь виконання і-го
обмеження у вигляді:
 (5.5)
(5.5)
і вирішують задачу знаходження:
![]() (5.6)
(5.6)
що еквівалентно вирішенню наступної задачі:
 (5.7)
(5.7)
Тут
![]() – величина на яку може бути порушене
обмеження.
– величина на яку може бути порушене
обмеження.
У [36] пропонується модифікувати запропонований вище метод, використавши замість лінійних функцій приналежності – гіперболічні:
 ,
(5.8)
,
(5.8)
де
![]() – значення j-ї
цільової функції в оптимальній для неї
точці
– значення j-ї
цільової функції в оптимальній для неї
точці
![]() ,
а
,
а
![]()
![]() .
(5.9)
.
(5.9)
Використовуючи формулу гіперболічного тангенса, і підставляючи
![]() (5.10)
(5.10)
приходимо до вигляду:
![]()
![]() (5.11)
(5.11)
Трохи інакше розглядається завдання НЛП в [37].
Обмеження
![]()
ціль (5.12)
![]()
Нечіткими
пропонуються параметри А,
В,
С,
K,
і
вони визначаються своїм центром а
і
шириною с,
тобто
функція приналежності нечіткого числа
![]() записується
як:
записується
як:
 (5.13)
(5.13)
Нечітка функція має вигляд F
![]() (5.14)
(5.14)
де
![]() –
є
множина всіх нечітких підмножин в Y.
–
є
множина всіх нечітких підмножин в Y.
Тоді, не роблячи відмінностей між цілями і обмеженнями, можна записати:
 (5.15)
(5.15)
![]() (5.16)
(5.16)
![]() (5.17)
(5.17)
і завдання зводиться до вигляду
![]() (5.18)
(5.18)
де
![]() –
бажане
значення відповідного обмеження; h
– параметр.
–
бажане
значення відповідного обмеження; h
– параметр.
Для вирішення цього завдання нелінійного програмування розроблений спеціальний алгоритм.
У [18, 32, 38] для вирішення завдань НЛП використовується поняття -рівнів. Тут необхідно вирішити N завдань лінійного програмування, де N – число -рівнів.
У
[11] розглядаються різні типи нечітких
обмежень, на основі RL
–
представлення нечітких чисел: нечітке
число
![]() може бути представлене трійкою параметрів
може бути представлене трійкою параметрів
![]() ,
де m
– середнє значення,
,
де m
– середнє значення,
![]() і
і
![]() – відповідно ліве (нижнє) і праве (верхнє)
відхилення.
– відповідно ліве (нижнє) і праве (верхнє)
відхилення.
Функція приналежності
![]() (5.19)
(5.19)
де
L
і
R
–
симетричні колоподібні функції, такі,
що
![]() ;
називають числом RL-типу
(рис. 5.1).
;
називають числом RL-типу
(рис. 5.1).
1. Система толерантних обмежень. Завдання нечіткого лінійного програмування (ЗНЛП) має вигляд:

 (5.20)
(5.20)
Це завдання еквівалентне наступним чітким:
 (5.21)
(5.21)
2. Система толерантних обмежень, що включають нечіткі змінні. Ставиться завдання:
![]() (5.22)
(5.22)
Необхідно
знайти максимально допустиму розмитість
![]() при даних
при даних
![]() таких,
що
могло
бути досягнуте за допомогою
таких,
що
могло
бути досягнуте за допомогою
![]() і
і
![]() .
Передбачається,
що всі нечіткі числа позитивні, RL-типу.
Ця система еквівалентна:
.
Передбачається,
що всі нечіткі числа позитивні, RL-типу.
Ця система еквівалентна:
 (5.23)
(5.23)
3. Система наближеної рівності. Розглядається завдання
![]() (5.24)
(5.24)
Чітка модель має вигляд
 (5.25)
(5.25)
По даному класу завдань планування необхідно зробити наступне зауваження. Якщо в первинному завданні є т обмежень, то у випадках 1 і 2 число обмежень буде 3m, а у разі 3 – 2т. Включення у випадки 1 і 2 обов’язкова рівність по середніх значеннях зменшує гнучкість моделі.
Завдання планування виробництва в деревообробній промисловості вирішене в [41]. Тут мова йде про багатокритерійному завданні наступного вигляду:
![]() (5.26)
(5.26)
Функція приналежності
 (5.27)
(5.27)
тоді завдання
![]() (5.28)
(5.28)
може бути вирішена стандартними прийомами.
У [42] описано завдання мінімізації числа потрібних для виробництва продукції машин. Пропонується наступна модель:
![]() (5.29)
(5.29)
Доводиться, що існує вектор
![]() такий, що рішення задачі
такий, що рішення задачі
![]() (5.30)
(5.30)
є в той же час рішення
поставленої задачі. Тут
![]() – міцність множини X.
– міцність множини X.
Приводиться також модель наближеного розподілу ресурсів і багатокритерійна неопукла модель виробничої програми. Для вирішення останньою запропоновано використовувати алгоритм Falk – Soland, який при використанні методу гілок і меж дозволяє отримати послідовність допустимих крапок, що є вирішенням ряду підзадач.
Розглянемо підхід рішенню задачі планування в нечіткому середовищі, заснований на LR-представленні нечітких множин, але що відрізняється від описаних в літературі.
Введемо наступні визначення.
Визначення 5.1. Нечітке
число
менше нечіткого числа
![]() (рис. 5.2), якщо
(рис. 5.2), якщо
![]() (5.31)
(5.31)
Визначення 5.2. Нечітке число більше нечіткого числа , якщо
![]() .
(5.32)
.
(5.32)

Рисунок 5.2 – Функція приналежності нечіткого числа
Визначення 5.3. Нечітке число рівне нечіткому, числу , якщо
![]() .
(5.33)
.
(5.33)
На підставі визначень (5.31) – (5.33) перейдемо до чіткого аналога системи (5.3):
 (5.34)
(5.34)
Агрегуючи змінні
![]() (5.35)
(5.35)
декомпозуємо (5.34) на наступні системи:
![]() (5.36)
(5.36)
![]() (5.37)
(5.37)
![]() .
(5.38)
.
(5.38)
У системи (5.37) і (5.38) введені додаткові обмеження, що відображають той факт, що повинне виконуватися нерівність:
![]() (5.39)
(5.39)
де х* – оптимальне вирішення системи (5.36).
Вирішивши системи (5.36) – (5.38), визначимо значення х*, х’*, х"*.
Тоді нечітке рішення задачі (5.3) в RL-зображенні (рис. 5.3) запишемо як
![]() .
(5.40)
.
(5.40)
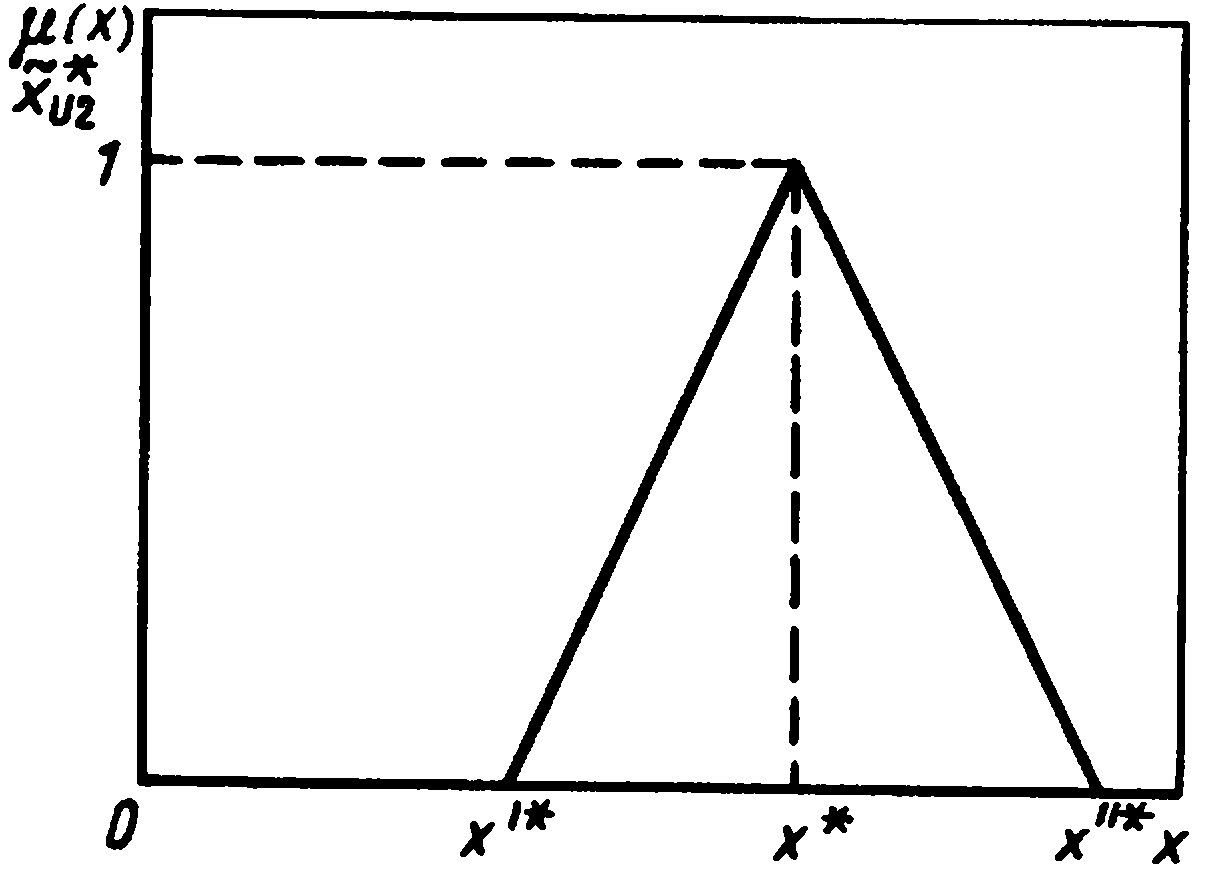
Рисунок 5.3 – Нечітке рішення задачі оптимізації при RL-представленні
Якщо
нижнє і верхнє відхилення вектора
![]() пропорційні
середньому значенню, то справедлива
наступна теорема.
пропорційні
середньому значенню, то справедлива
наступна теорема.
Теорема
5.1.
Якщо для нечіткого числа
![]() виконується
умова:
виконується
умова:
![]() (5.41)
(5.41)
і система (5.36) має рішення х*, то (5.37) і (5.38) мають рішення:
![]() .
(5.42)
.
(5.42)
Доведення.
Нехай
(5.36) має рішення х*.
Розіб’ємо
матрицю А
на дві підматриці (за умови
![]() ):
Б
– квадратну
):
Б
– квадратну
![]() і
N
– розмірністю
і
N
– розмірністю
![]() :
:
![]() .
(5.43)
.
(5.43)
Розіб’ємо змінні і вектор цін відповідно:
![]() (5.44)
(5.44)
Тоді запишемо:
![]() .
(5.45)
.
(5.45)
звідки
![]() .
(5.46)
.
(5.46)
Значення функціонала
![]() .
(5.47)
.
(5.47)
Як відомо, умова допустимості має вигляд
![]() .
(5.48)
.
(5.48)
Враховуючи, що в оптимальному рішенні небазисні змінні рівні нулю, умова (5.48) буде мати вигляд
![]() .
(5.49)
.
(5.49)
Умову оптимальності запишемо як
![]() .
(5.50)
.
(5.50)
Як видно з (5.49), (5.50), зміна правої частини приведе до зміни лише умови допустимості (5.48).
Запишемо в аналогічному вигляді рішення задачі (5.36):
![]() (5.51)
(5.51)
але
![]() Так як
Так як
![]() – допустиме рішення (5.36) і
– допустиме рішення (5.36) і
![]() то
то
![]() Звідси випливає, що
Звідси випливає, що
![]()
Думаючи аналогічно, отримаємо:
![]() (5.52)
(5.52)
що і потрібно було доказати.
В цьому випадку для отримання нечіткого розв’язку системи (5.3) достатньо получити розв’язок системи (5.36), а розв’язок систем (5.37) і (5.38) можна розраховувати по (5.40).