

БЕЛОРУСКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Теоретическая механика»
ЛЕКЦИЯ
по учебной дисциплине
«Теоретическая механика»
Раздел II. «Кинематика»
Тема № 2.2. «Кинематика точки»
Лекция № 11
«Ускорение точки»
Минск-2010г.
УЧЕБНЫЕ И ВОСПИТАТЕЛЬНЫЕ ЦЕЛИ:
1. Ознакомиться с ускорением точки при различных способах задания движения.
2. Изучить касательное и нормальное ускорения точки.
3. Воспитание у обучаемых общей и технической культуры, чувства гордости за выбранную воинскую профессию.
УЧЕБНЫЕ ВОПРОСЫ:
1. Ускорение точки при различных способах задания движения. Естественные координатные оси. Вектор кривизны.
2. Определение ускорения точки при естественном способе задания движения. Касательное и нормальное ускорения точки.
3. Некоторые частные случаи движения точки.
ВРЕМЯ: два академических часа
МЕСТО: учебная аудитория
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ ПРЕПОДАВАТЕЛЮ:
Изложение материала проводится в сочетании дедуктивного (от общего к частному – определения, анализ формул и т.п.) и индуктивного (от частного к общему – вывод формул, примеры работы механизмов и т.п.) методов. Рассматриваемые вопросы иллюстрируются плакатами и макетами механических устройств.
Активизация работы обучаемых достигается проблемным изложением материала, путём постановки и решения проблемных вопросов и задач, а также использование продуктивных методов обучения: частично-поискового и исследовательского.
Воспитательные цели достигаются личным примером преподавателя, требовательностью в выполнении руководящих документов и проведением информационной работы в идеологической и научно-технической области.
УЧЕБНО-МАТЕРИАЛЬНОЕ ОБЕСПЕЧЕНИЕ: плакаты.
УЧЕБНАЯ ЛИТЕРАТУРА:
1. Курс теоретической механики / Под ред. К.С. Колесникова. М: Изд-во МГТУ им. Н.Э. Баумана, 2000 г.
2. Никитин Н.Н. Курс теоретической механики: Учебник. – М.: Изд-во Высшая школа, 1990 г. 600 стр.
3. Яблонский А.А., Никифорова В.М. Курс теоретической механики. Статика. Кинематика. Динамика. – М.: Интеграл-ПРЕСС, 2006.
4. Тульев В.Д. Теоретическая механика. Статика и кинематика. – Мн.: Книжный дом, 2004.
5. Хижняк Е.И. Теоретическая механика. Методические рекомендации курсантам по подготовке к занятиям. Ч.III. – Мн.: ВА РБ, 2006.
План лекции:
I. ВСТУПИТЕЛЬНАЯ ЧАСТЬ (3 минуты):
Проверка наличия обучаемых, внешнего вида и их готовность к занятию (наличие конспектов и чертежных принадлежностей).
Объявление темы, учебных вопросов и целей занятия, практической значимости тематики нового материала в изучении дисциплин по профилю обучения.
II. ОСНОВНАЯ ЧАСТЬ (85 минут):
Вопрос 1. Ускорение точки при различных способах задания движения.
Ускорение точки можно задать тремя способами:
векторный;
координатный;
естественный.
Векторный способ задания движения.
Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки.
Пусть
в некоторый момент времени t
движущаяся точка находится в положении
М
и движется со скорость
![]() ,
а в момент t1
находится в положение M1
и имеет скорость
,
а в момент t1
находится в положение M1
и имеет скорость
![]() (рис. 1).
(рис. 1).
Рисунок 1
Тогда
за промежуток времени
![]() скорость точки получает приращение
скорость точки получает приращение
![]() .
Для построения вектора
отложим от точки М
вектор, равный
,
и построим параллелограмм, в котором
диагональю будет
,
а одной из сторон
.
Тогда, очевидно, вторая сторона и будет
изображать вектор
.
Для построения вектора
отложим от точки М
вектор, равный
,
и построим параллелограмм, в котором
диагональю будет
,
а одной из сторон
.
Тогда, очевидно, вторая сторона и будет
изображать вектор
![]() .
Заметим, что вектор
всегда направлен в сторону вогнутости
траектории.
.
Заметим, что вектор
всегда направлен в сторону вогнутости
траектории.
Отношение
приращения вектора скорости
к соответствующему промежутку времени
![]() определяет вектор
среднего ускорения точки за
этот промежуток времени:
определяет вектор
среднего ускорения точки за
этот промежуток времени:
![]() (1)
(1)
Вектор среднего ускорения имеет, очевидно, то же направление, что и вектор , т. е. направлен в сторону вогнутости траектории.
Ускорением
точки в данный момент времени t
называется
векторная
величина
![]() ,
к которой стремится среднее ускорение
,
к которой стремится среднее ускорение
![]() при
стремлении промежутка времени Δt
к нулю:
при
стремлении промежутка времени Δt
к нулю:
![]() ,
,
или, с учетом определения скорости из предыдущей лекции
![]() (2)
(2)
Следовательно, вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
Размерность ускорения - длина/(время)2; в качестве единицы измерения применяется обычно м/сек2.
Из
формулы (2) следует также, что вектор
ускорения точки
![]() равен отношению элементарного приращения
вектора скорости
равен отношению элементарного приращения
вектора скорости
![]() к
соответствующему промежутку времени
dt.
к
соответствующему промежутку времени
dt.
Найдем,
как располагается вектор
по отношению к траектории точки При
прямолинейном движении вектор
направлен, очевидно, вдоль прямой, по
которой движется точка. Если траекторией
точки является плоская кривая, то вектор
ускорения
,
так же как и вектор
![]() ,
лежит в плоскости этой кривой и направлен
в сторону ее вогнутости. Если траектория
не является плоской кривой, то вектор
будет направлен в сторону вогнутости
траектории и будет лежать в плоскости,
проходящей через касательную к траектории
в точке М
и прямую, параллельную касательной в
соседней точке
M1.
В пределе, когда точка M1
стремится к М,
эта плоскость занимает положение так
называемой соприкасающейся
плоскости.
Следовательно, в общем случае вектор
ускорения
лежит в соприкасающейся плоскости и
направлен в сторону вогнутости кривой.
,
лежит в плоскости этой кривой и направлен
в сторону ее вогнутости. Если траектория
не является плоской кривой, то вектор
будет направлен в сторону вогнутости
траектории и будет лежать в плоскости,
проходящей через касательную к траектории
в точке М
и прямую, параллельную касательной в
соседней точке
M1.
В пределе, когда точка M1
стремится к М,
эта плоскость занимает положение так
называемой соприкасающейся
плоскости.
Следовательно, в общем случае вектор
ускорения
лежит в соприкасающейся плоскости и
направлен в сторону вогнутости кривой.
Ускорения точки при координатном способе задания движения.

Рисунок 2
Вектор ускорения
точки
![]() Отсюда на основании теоремы о проекции
производной получаем:
Отсюда на основании теоремы о проекции
производной получаем:
![]()
![]()
![]() (3)
(3)
или
![]()
![]()
![]() (4)
(4)
т.е. проекции ускорения точки на оси координат равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул:
![]() (5)
(5)
где α1, β1, γ1 – углы, образуемые вектором ускорения с осями координат.
В случае же прямолинейного движения, которое задается одним уравнением x=f(t), будем иметь
![]()
![]() (6)
(6)
Так
как проекции на другие оси отсутствуют,
то, следовательно, в данном случае
![]()
![]() т. е. при прямолинейном движении формулы
(9) непосредственно определяют скорость
и ускорение точки.
т. е. при прямолинейном движении формулы
(9) непосредственно определяют скорость
и ускорение точки.
Естественные координатные оси. Вектор кривизны.
Проведем в точке М кривой АВ соприкасающуюся плоскость, нормальную плоскость, перпендикулярную касательной, и спрямляющую плоскость, перпендикулярную соприкасающейся и нормальной плоскостям, образующую с этими плоскостями естественный трехгранник (рис. 3).
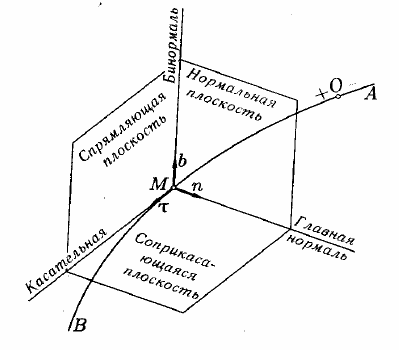
Рисунок 3
Линия пересечения соприкасающейся и нормальной плоскостей называется главной нормалью кривой.
Линия пересечения нормальной и спрямляющей плоскостей называется бинормалью кривой.
Естественными
координатными осями называются три
взаимно перпендикулярные оси; касательная,
направленная
в сторону возрастания дуговой координаты,
главная
нормаль, направленная
в сторону вогнутости кривой, и бинормаль,
направленная
по отношению к касательной и главной
нормали так же, как ось Оz
направлена
по отношению к осям Ох
и
Оу
в
правой системе координатных осей.
Единичные векторы-орты этих осей
обозначаются соответственно
![]() и
и
![]() .
Естественные
координатные оси имеют начало в точке
М
кривой
и при движении точки М
по
этой кривой перемещаются вместе с ней,
оставаясь взаимно перпендикулярными,
но изменяя свое направление в пространстве.
.
Естественные
координатные оси имеют начало в точке
М
кривой
и при движении точки М
по
этой кривой перемещаются вместе с ней,
оставаясь взаимно перпендикулярными,
но изменяя свое направление в пространстве.
Возьмем
на кривой АВ
две
точки М
и
М1,
соответствующие дуговым координатам
ОМ
= s
и
ОM1
= s
+ Δs.
Покажем
орты касательной
![]() и
и
![]() в
этих точках (рис. 4). Модуль орта
,
равный
единице, постоянен, но направление орта
изменяется при перемещении точки по
кривой, т. е. орт
является переменным
вектором.
в
этих точках (рис. 4). Модуль орта
,
равный
единице, постоянен, но направление орта
изменяется при перемещении точки по
кривой, т. е. орт
является переменным
вектором.
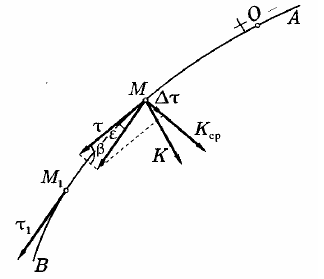
Рисунок 4
Определим приращение
орта
![]() на участке ММ1
= ∆s.
Для этого
отложим от точки М
орт
и построим
при этой точке параллелограмм, одной
из сторон которого будет орт
,
а диагональю — орт
на участке ММ1
= ∆s.
Для этого
отложим от точки М
орт
и построим
при этой точке параллелограмм, одной
из сторон которого будет орт
,
а диагональю — орт
![]() .
Тогда другая
сторона параллелограмма будет приращением
орта
,
т. к.
.
Тогда другая
сторона параллелограмма будет приращением
орта
,
т. к.
![]() .
.
Разделим
приращение орта
на
приращение дуговой координаты ∆s.
Вектор
![]() характеризующий
поворот касательной к кривой на участке
ММ1,
называется
вектором
средней кривизны кривой на
участке ММ1.
Этот
вектор имеет направление вектора
,
т.
е. направлен в сторону вогнутости кривой.
характеризующий
поворот касательной к кривой на участке
ММ1,
называется
вектором
средней кривизны кривой на
участке ММ1.
Этот
вектор имеет направление вектора
,
т.
е. направлен в сторону вогнутости кривой.
Предел
![]() ,
к
которому стремится вектор средней
кривизны кривой
,
к
которому стремится вектор средней
кривизны кривой
![]() ,
когда
∆s
стремится к нулю, называется вектором
кривизны кривой в
данной точке:
,
когда
∆s
стремится к нулю, называется вектором
кривизны кривой в
данной точке:
![]() .
.
Орт касательной к кривой является вектор-функцией дуговой координаты s, т. к. его направление зависит от положения точки на кривой, т. е.
![]()
Тогда
![]()
Следовательно, вектор кривизны кривой в данной точке равен производной от орта касательной к кривой по дуговой координате.
Для определения модуля этого вектора рассмотрим равнобедренный треугольник, образованный , и (рис. 4).
Угол
![]() между
направлениями касательных в двух точках
кривой М
и
М1
называется
углом
смежности. При
малом расстоянии ∆s
угол
смежности тоже мал.
между
направлениями касательных в двух точках
кривой М
и
М1
называется
углом
смежности. При
малом расстоянии ∆s
угол
смежности тоже мал.
Модуль
![]() найдем
как длину основания равнобедренного
треугольника с малым углом
при
вершине и боковыми сторонами, равными
единице.
найдем
как длину основания равнобедренного
треугольника с малым углом
при
вершине и боковыми сторонами, равными
единице.
Тогда
![]()
Модуль вектора кривизны К определяется по формуле
![]()
Из
дифференциальной геометрии известно,
что предел отношения угла смежности
к приращению дуговой координаты
![]() при стремлении
к нулю равен кривизне кривой
при стремлении
к нулю равен кривизне кривой
![]() ,
при
,
при
![]() - радиус кривизны кривой в точке М.
- радиус кривизны кривой в точке М.
![]()
Установим также направление вектора кривизны.
Вектор средней кривизны находится в плоскости треугольника, составленного векторами , и , предельным положением которого является соприкасающаяся плоскость. Следовательно, вектор кривизны расположен в соприкасающейся плоскости.
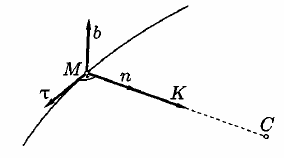
Рисунок 5
Рассмотрим
угол
![]() ,
составленный вектором
с
касательной в точке М
(рис.
4):
,
составленный вектором
с
касательной в точке М
(рис.
4):
2β = 180° - ε; β = 90° - ε /2.
При приближении точки M1 к точке М угол смежности ε стремится к нулю, а поэтому
![]()
Так как вектор кривизны расположен в соприкасающейся плоскости и перпендикулярен орту , то он направлен по главной нормали к центру кривизны кривой (рис. 5).
Представим вектор в виде произведения орта на модуль этого вектора:
![]()
где р = МС — радиус кривизны кривой в данной точке М.