

Сравнительный анализ. Непрерывный регулятор
Поведение нелинейной системы с передаточными функциями регулятора, найденных в п.4 и п.8, на различных режимах:
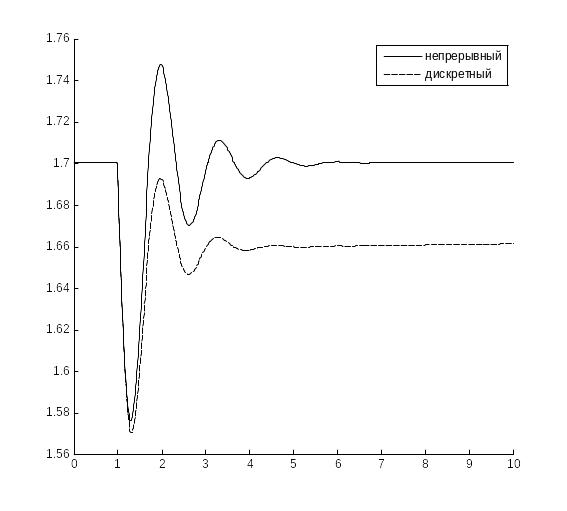
а) Переходный процесс при переходе с номинального на заданный режим представлен на рисунке 21;
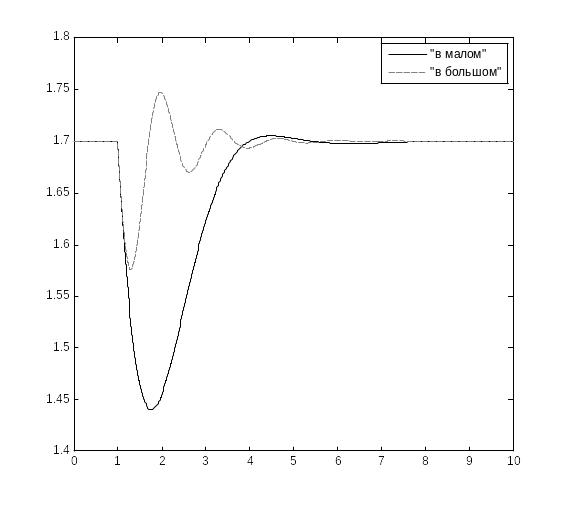
рис. 21
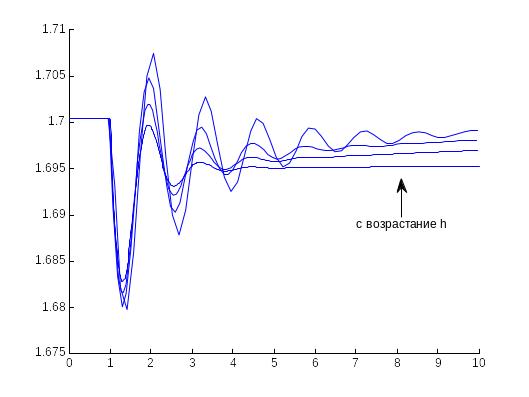
б) Переходный
процесс в окрестности заданного режима
при малых возмущениях ( устанавливается
в 31.5 на первой секунде процесса)
представлен на рисунке 22.
устанавливается
в 31.5 на первой секунде процесса)
представлен на рисунке 22.
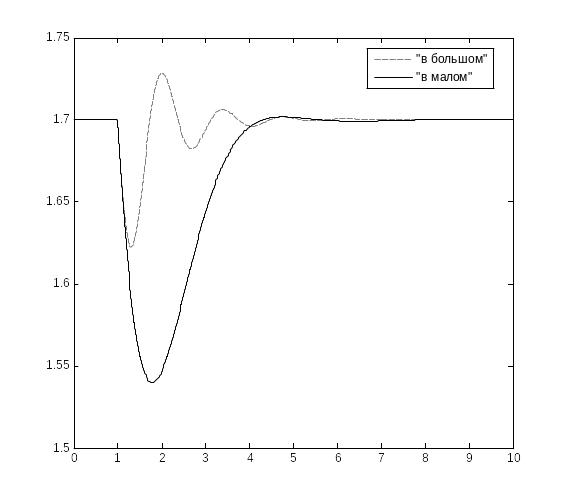
рис. 22
В качестве окончательного регулятора принимаю полученный в ходе синтеза в «большом», т.к. он обеспечивает приемлемое время регулирования и перерегулирование, лучшее по сравнению с регулятором полученным в ходе синтеза в «малом». Передаточная функция регулятора:
Дискретизация регулятора
Используя известную
передаточную функцию
 регулятора определим его дискретную
передаточную функцию
регулятора определим его дискретную
передаточную функцию
 .
Для определения периода квантования
необходимо выполнение следующего
неравенства:
.
Для определения периода квантования
необходимо выполнение следующего
неравенства:
 ,
где
,
где
 -
частота среза разомкнутой системы,
-
частота среза разомкнутой системы,
 =0,05-
допустимое значение
приведённой погрешности аппроксимации.
=0,05-
допустимое значение
приведённой погрешности аппроксимации.
ЛАЧХ разомкнутой системы приведена на рисунке 23.
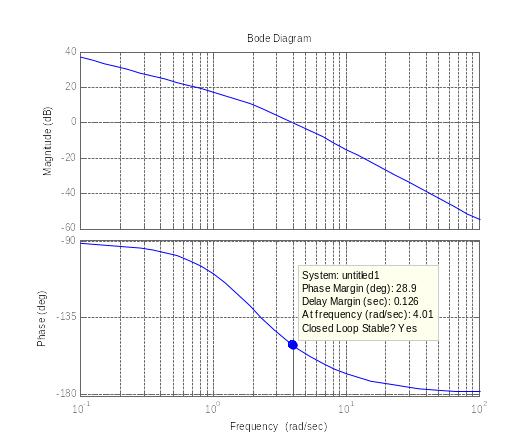
рис. 23
=4
рад/c, т.о.
 ,
примем
,
примем

Передаточная функция дискретного регулятора имеет следующий вид:
Сравнительный анализ. Дискретный регулятор
Повторим п.9 с дискретным регулятором.

Заключение
Использование метода Рунге-Кутта 3-го порядка с шагом интегрирования равным 0,021 даёт значительную экономию времени при моделировании. Эта экономия позволяет выполнять большее число проходов при поиске решений, что увеличивает точность найденных решений.
В ходе работы был синтезирован непрерывный регулятор с передаточной функцией:
Данный регулятор подходит для работы как при переходе с режима на режим, так и для работы в малой окрестности заданного режима.
В то же время использовать дискретный регулятор не представляется возможным, в силу крайней затянутости процесса регулирования.
Использованная литература:
Каменев П.Н., Сканави А.Н. Отопление и вентиляция: Учебник для вузов Стройиздат, 1975
http:––en-co.wika.de–upload–DS_PE8153_ru_ru_27872.pdf