

Структурная схема системы управления
По заданным уравнениям, представленным в причинно-след-ственной форме, составим структурную схему системы управления давлением пара устройства уплотнения;
Структурная схема объекта управления (уравнительный коллектор)
Уравнение:
на структурной схеме представляется в виде, приведенном на рисунке 1:
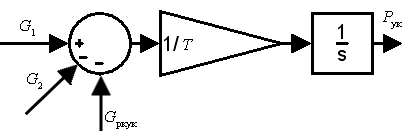
Рис. 1.
Уравнение:
на структурной схеме представляется в виде, приведенном на рисунке 2:
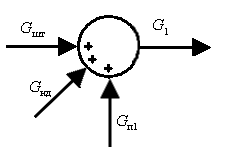
Рис. 2.
Уравнение:

на структурной схеме представляется в виде, приведенном на рисунке 3:
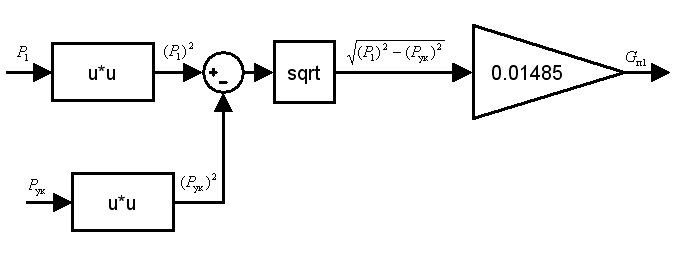
Рис. 3.
Уравнение:
.
на структурной схеме представляется в виде, приведенном на рисунке 4:
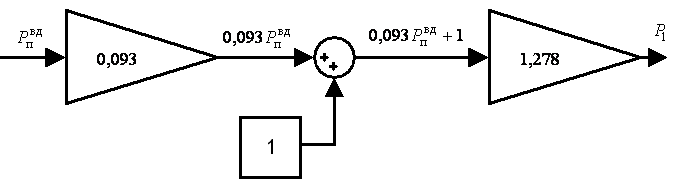
Рис. 4.
Уравнение:

на структурной схеме представляется в виде, приведенном на рисунке 5:
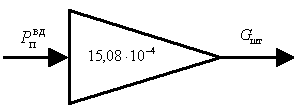
Рис. 5.
Уравнение:

на структурной схеме представляется в виде, приведенном на рисунке 6:
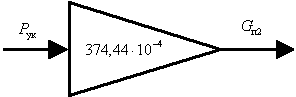
Рис.6.
Уравнение:
на структурной схеме представляется в виде, приведенном на рисунке 7:
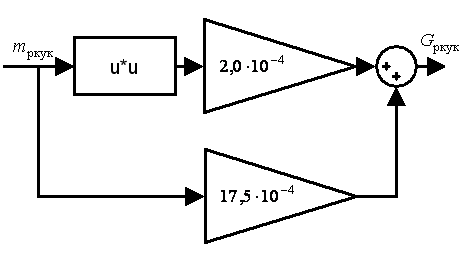
Рис. 7.
Структурная схема исполнительного механизма, датчика и регулятора
Уравнение:
на структурной схеме представляется в виде, приведенном на рисунке 8:
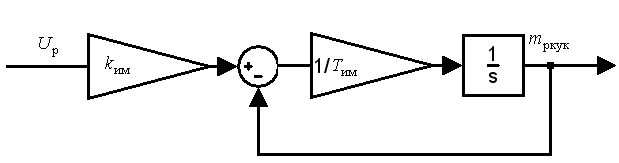
Рис.8.
Уравнение:
на структурной схеме представляется в виде, приведенном на рисунке 9:
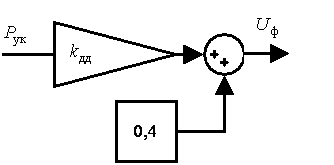
Рис.9.
Уравнение:
на структурной схеме представляется в виде, приведенном на рисунке 10:
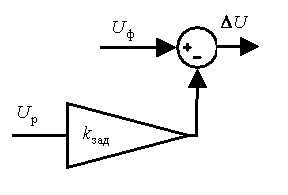
Рис.10.
Уравнение:
на структурной схеме представляется в виде, приведенном на рисунке 11:
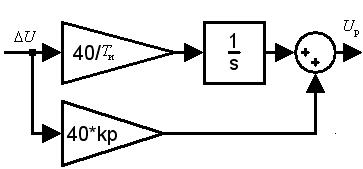
Рис.11.
Общая структурная схема
Общая структурная схема, реализованная в среде Simulink, представляется в виде, приведенном на рисунке 12:
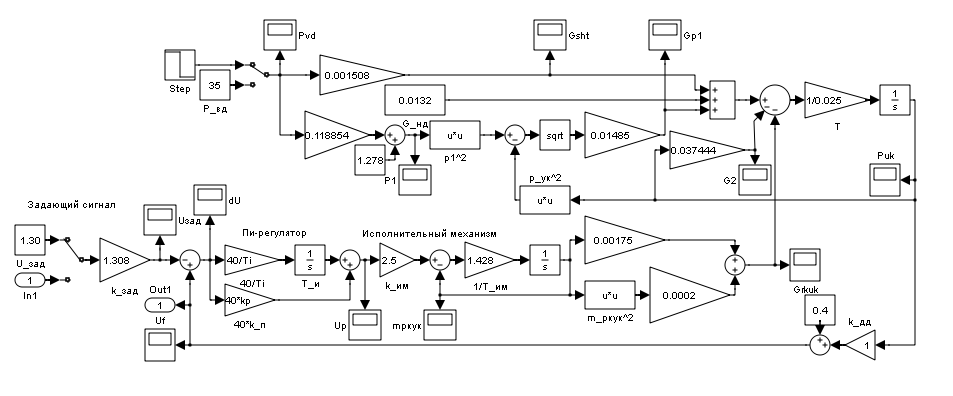
Рис.12.
Состояния равновесия при номинальном режиме
Найдём состояние равновесия системы при изменении давления пара
В качестве начального
вектора
 приближения к равновесию принимаем
значения, отвечающие номинальному
режиму. А именно:
приближения к равновесию принимаем
значения, отвечающие номинальному
режиму. А именно:
 кгс/см2;
В;
кгс/см2;
В;
 В;
В;
 мм;
В;
мм;
В;
В качестве коэффициентов регулятора примем kp = Ti = 1;
Для этого воспользуемся следующей командой:
kp = 1; Ti = 1; x0 = [1.30;20;8] ; y0 = 1.7; u0 = 1.3; iu = [1];
[x,u,y,dx] = trim('m', x0, u0, y0, [], iu, [])
Результат выполнения:
x =
1.3004
19.9916
7.9966
u =
1.3000
y =
1.7004
dx =
1.0e-012 *
-0.0777
-0.2892
0
Таким образом, значение скорректированного вектора равновесия:
 кгс/см2;
кгс/см2;
 мм.
мм.
 В;
В;
В;
 В;
В;
Регулятор реализует ПИ-закон управления. Для определения влияния значения коэффициентов регулятора на статику, проведём вычислительный эксперимент при разных значениях и .
Для этого воспользуемся следующими командами:
kp = 1; Ti = 1; x0 = [1.3004;19.9916;7.9966] ; y0 = 1.7; u0 = 1.3; iu = [1];
x = x0; i = 1;
for kp = 0.1:0.1:10
for Ti = 0.1:0.1:10
i = i + 1
[x(:,i),u,y,dx] = trim('m', x0, u0, y0, [], iu, []);
end
end
fd = max(rot90(x)) - min(rot90(x))
В результате, мы получили:
fd(1) = fd(2)= fd(3) = 0.
fd(i) характеризует размах выборки, по каждой из координат вектора состояния. Т.к. размах нулевой для всех координат, то можно заключить, что коэффициенты регулятора, не оказывают влияния на значение вектора состояния.
Состояния равновесия при заданном режиме
Изменяя начальные значения вектора состояния равновесия, произведем анализ возможности существования других состояний равновесия для заданного режима ( = 35 кгс/см2).
Область поиска состояний равновесия ограничим допустимыми значениями выходов интегрирующих звеньев. А именно:
1 кгс/см2< < 3.8 кгс/см2 [1]
0 мм < < 50 мм
0
В < <
10В [2]
<
10В [2]
Для автоматизации поиска равновесных состояний воспользуемся следующим кодом:
kp = 1; Ti = 1; y0 = 1.7; u0 = 1.3; iu = [1]; i = 1;
x = [0;0;0];
for Puk = 1:0.35:3.8
for mrkuk = 0:6.25:50
for Ur = 0:1.25:10
x0 = [Puk;mrkuk;Ur];
[x(:,i),u,y,dx] = trim('m', x0, u0, y0, [], iu, []);
i = i + 1
end
end
end
Для определения наличия различных состояний равновесия воспользуемся следующими командами:
fd = max(rot90(x)) - min(rot90(x))
fd(i) характеризует размах выборки, по каждой из координат вектора состояния. Т.к. размах нулевой для всех координат, то можно заключить, что в заданной области поиска существует только одно состояние равновесяи.
Значение координат вектора состояния равновесия для заданного режима:
кгс/см2;
 мм.
мм.
 В;
В;
В;
В;
Аналитическое исследование существования состояний равновесия:
Для состояния равновесия необходимо, чтобы сигнал на входе интеграторов равнялся 0, следовательно:
|
|
Аналитическое исследование показало те же результаты, что и исследование численными методами.