

4.5. Пример построения нечеткого регулятора
В качестве примера здесь приводится сравнение пропорционально-дифференциального (ПД) и нечеткого регуляторов, проведенное в среде Matlab для объекта управления третьего порядка. Структурная схема системы управления представлена на рис. 4.8. Оценивается эффективность регуляторов в условиях изменения параметров объекта управления, при воздействии внешнего возмущения и введении нелинейности звена с насыщением 0.15.
Р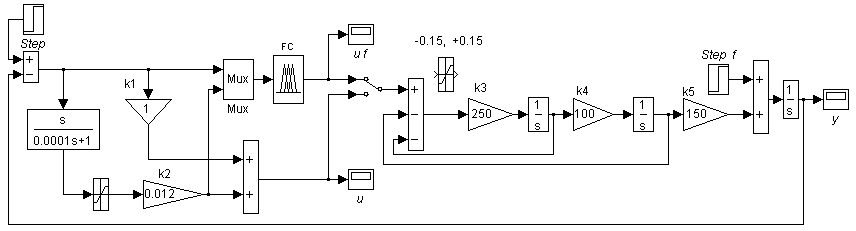 ис.
4.8
ис.
4.8
Параметры объекта управления в номинальном режиме: k3 = 250,
k4 = 100, k5 = 150. Закон управления ПД-регулятора: u = k1e + k2 de, где
k1 = 1, k2 = 0.012, e ошибка (разность между входным и выходным сигналами системы), de производная ошибки. Нечеткий регулятор построен на основе правил нечеткого логического вывода Такаги Сугено (3.26). При фаззификации выбрана колоколообразная функция принадлежности (см. прил. 4), которая задается выражениями [19]:
![]() (e)
=
(e)
=
 ,
(de)
=
,
(de)
=
 .
(4.1)
.
(4.1)
Параметры функций принадлежности (a, b, c) входных переменных нечеткого регулятора ошибки e и производной ошибки de даны в табл. 4.1, где М (малое), С (среднее), Б (большое) лингвистические значения лингвистических переменных "ошибка" и "производная ошибки".
Таблица 4.1 Таблица 4.3
e |
a |
b |
c |
|
v |
b0 |
b1 |
b2 |
|
M |
2.48 |
1.639 |
2.32 |
|
v1 |
5.272 |
8.053 |
5.261 |
|
C |
6.499 |
0.9128 |
6.552 |
|
v2 |
3.256 |
0.3496 |
0.296 |
|
Б |
4.922 |
0.3073 |
16.2 |
|
v3 |
0.3377 |
0.3447 |
0.0893 |
|
de |
a |
b |
c |
v4 |
1.251 |
0.1271 |
0.101 |
||
M |
3.007 |
1.347 |
1.17 |
v5 |
0.3377 |
0.1068 |
0.13 |
||
C |
5.81 |
2.844 |
7.693 |
v6 |
1.585 |
0.07642 |
0.1814 |
||
Б |
4.733 |
1.534 |
15.6 |
v7 |
5.98 |
0.3158 |
0.03344 |
||
|
|
v8 |
0.9173 |
0.03171 |
0.05772 |
||||
Таблица 4.2 |
|
v9 |
3.622 |
0.2533 |
0.2281 |
||||
e, de |
М |
С |
Б |
|
|
||||
М |
v1 |
v2 |
v3 |
|
|||||
С |
v4 |
v5 |
v6 |
||||||
Б |
v7 |
v8 |
v9 |
||||||
Границы изменения базовых переменных: ошибки e [0 16]; производной ошибки de [0 16]; управления uf [0.7752 1.285]. Нечеткие правила приведены в табл. 4.2. Параметры заключений нечетких правил даны в табл. 4.3.
Аналитический расчет нечеткого
вывода. Выполним расчет для входных
переменных регулятора
ошибки е0 =1 и производной
ошибки dе0
=3. На основе (3.27) функция принадлежности
заключения i-го
нечеткого правила определяется в виде
![]()
![]() ,
гдe
,
гдe
![]()
![]() .
C учетом (4.1), используя
значения табл. 4.1, 4.2, в соответствии с
выбранными обозначениями получим:
.
C учетом (4.1), используя
значения табл. 4.1, 4.2, в соответствии с
выбранными обозначениями получим:
![]()
![]()
![]()
![]()
![]()
![]()
На основе правил (3.26) с учетом значений bi , i = 0,1,2, для выбранных значений входных переменных регулятора, заключения нечетких правил примут следующие значения: v1 = 29.108, v2 = 2.7176, v3 = 0.2749,
v4 = 0.821, v5 = 0.0545, v6= 1.117, v7 = 5.564, v8 = 1.0588, v9 = 2.684.
И спользуя
при дефаззификации формулу весового
осреднения (3.29), получим четкое
значение сигнала управления
спользуя
при дефаззификации формулу весового
осреднения (3.29), получим четкое
значение сигнала управления
 .
.
На рис. 4.9, а показаны кривые переходных процессов в системе управления при введении нелинейного звена с насыщением, а на рис. 4.9, б кривые переходных процессов в системе управления при изменении параметров объекта (k3 = 200, k4 = 200, k5 = 500). Исследование моделированием показало сравнительную эффективность нечеткого подхода.