2.8 Сигнали. Їх види
Найчастіше в теорії автоматичного управління використовуються наступні сигнали.
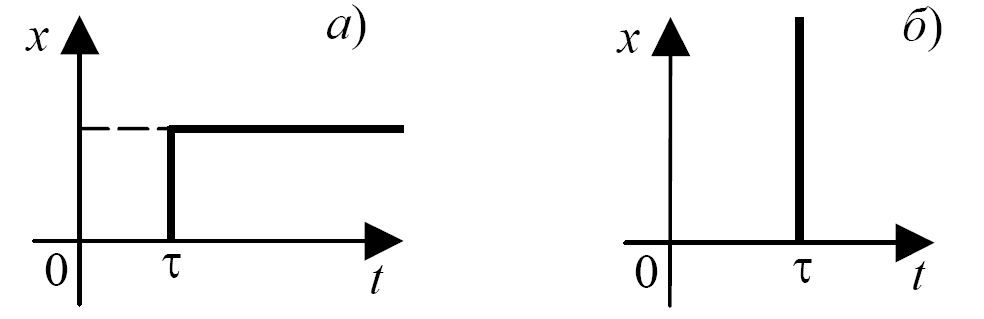
1 Одиничний стрибок (рис. 2.2). 1(t) називається також функцією Хевісайда.
|
(2.16) |
 ,
,
Строго
кажучи, функція Хевісайда фізично не
реалізовується, проте, якщо, наприклад,
на досліджуваному об'єкті різко відкрити
вентиль, внаслідок чого витрата речовини,
що подається, зміниться стрибком з
 до
до
 то говорять, що на вході об'єкту
реалізований стрибкоподібний сигнал
величиною
то говорять, що на вході об'єкту
реалізований стрибкоподібний сигнал
величиною
 і
якщо остання різниця рівна одиниці, то
на вході реалізується одиничний стрибок.
і
якщо остання різниця рівна одиниці, то
на вході реалізується одиничний стрибок.
Спектральна характеристика для одиничного стрибка:
|
(2.16) |
 .
.
2 Одинична імпульсна функція – дельта-функція (мал. 2.3) – це функція, що задовольняє наступним умовам:
|
(2.17) |
 ,
,
|
|
Рис. 2.2Одиничний стрибок |
Рис. 2.3Одиничний імпульс |
Дельта-функцію
називають також функцією Дираку, вона
відноситься до класу сингулярних
функцій. Цю функцію, що також фізичноне
реалізовується, можна представити як
імпульс нескінченно малої тривалості
і нескінченно великої амплітуди, тобто
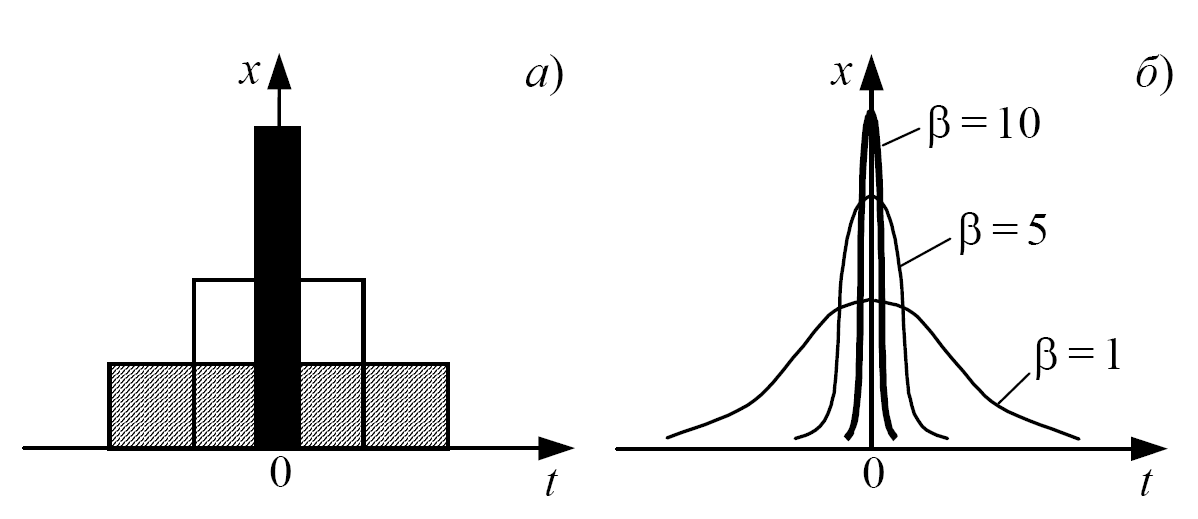
як межа, до якої наближується прямокутний
імпульс з підставою
 і
площею, рівній одиниці (рис. 2.4, а),
якщо
і
площею, рівній одиниці (рис. 2.4, а),
якщо
 так, щоб площа імпульсу зберігалася
рівній одиниці. Також δ-функцию
можна представити як межу деякої функції
(рис. 2.4, б):
так, щоб площа імпульсу зберігалася
рівній одиниці. Також δ-функцию
можна представити як межу деякої функції
(рис. 2.4, б):
|
(2.18) |
 .
.
|
Рис. 2.4Представлення дельта-функції: а – прямокутний імпульс; б – δ(у, t) -функція |
До основних властивостей дельта-функції можна віднести наступну рівність:
|
(2.19) |

δ-функція є парною функцією:
|
(2.20) |
|
(2.21) |
 ,
,
тобто з безперервної функції можна "вирізувати" одну ординату.
Останнє співвідношення, використовуючи розглянуті вже властивості δ-функції, доводиться таким чином:
|
|

Спектральна
характеристика дельта-функції:
 .
.
Між функцією Хевісайда і функцією Дираку існує зв'язок, що виражається співвідношенням
|
(2.22) |

На практиці вважається, що на вхід об'єкту подана δ-функция, якщо час дії прямокутного імпульсу набагато менше часу перехідного процесу.
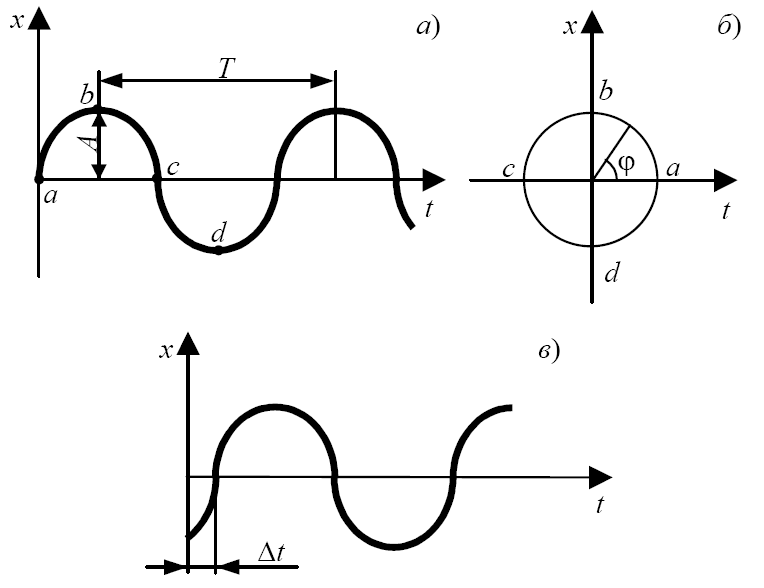
3 Гармонійний сигнал (рис. 2.5, а)
|
(2.23) |

використовується при дослідженні систем автоматичного регулювання частотними методами.
Синусоїдальний гармонійний сигнал можна представити як обертання вектора довжиною навколо початку координат (рис. 2.5, б) з деякою кутовою швидкістю рад/с.
Гармонійний
сигнал характеризується такими
параметрами, як амплітуда –
;
період –
;
фаза – .
.
|
Рис. 2.5Гармонійний сигнал: а – звичайний сигнал; б – представлення гармонійного сигналу обертанням вектора; у – гармонійний сигнал із зрушенням фази |
Між періодом і кутовою швидкістю справедливі співвідношення
|
(2.24) |

Якщо коливання починаються не з нуля, то вони характеризуються фазою коливань (рис. 2.5, в), яка в часовій області характеризується відрізком але зазвичай фазу виражають в радіанах – (рис. 2.5, б). Переклад здійснюється по формулі
|
(2.25) |

На практиці для отримання гармонійного сигналу використовується генератор синусоїдальних коливань.
4 Зсунуті елементарні функції.
До
цих функцій відносяться функції Хевісайда
і Дираку із запізнюванням, тобто
 і
і
 (рис.
2.6),
(рис.
2.6),
|
Рис. 2.6Зсунені елементарні функції |
причому
 .
.
Всі властивості δ-функціїзберігаються, але записуються у вигляді:
|
|
|
 ;
; ;
; .
.
5 Сигнал довільної форми – (рис. 2.10, а).
Будь-який
сигнал довільноїформиможнапредставити
за допомогоюδ-функції.
З цією метою виділяється довільний
момент часу
і
будується стовпчик заввишки
(рис. 2.7, б)відповідний
значенню сигналу у момент часу
 і
основою
і
основою
 .
.
Цей
імпульс можна виразити через наближену
дельта-функцію –

|
|

тобто
 .
.
|
Рис. 2.7Сигнал довільної форми: а – вхідний безперервний сигнал; б – імпульс; в – суперпозиція імпульсів, що визначають сигнал. |
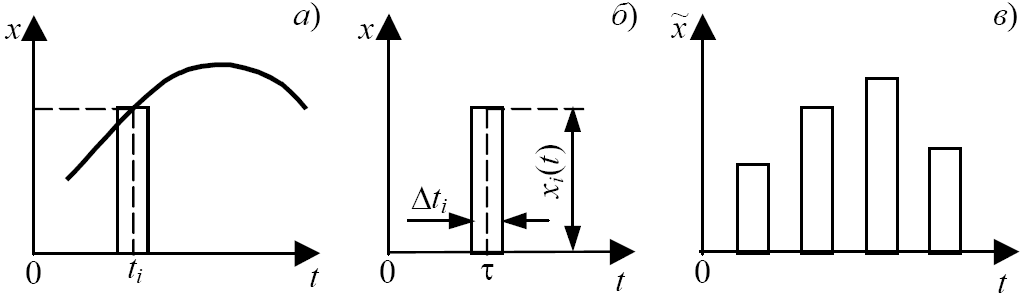
Замінюючи
функцію x(t)
набором
імпульсів (мал. 2.7, в),
можна записати: .
.
Якщо
тепер
 то
то
|
(2.26) |
Сигнал
довільної форми можна представити і
через одиничні функції, для чого вираз
(2.26) слід проінтегрувати по частинах,
використовуючи співвідношення
 внаслідок чого отримують наступне
співвідношення
внаслідок чого отримують наступне
співвідношення
|
(2.27) |