

3.7 Інтеграл Дюамеля
Інтеграл
Дюамеля використовується для визначення
виходу об'єкту
при довільному вхідному сигналі
і відомих
 або
.
або
.
Передбачається, що на вхід об'єкту, що описується ваговою функцією подається сигнал (рис. 3.12, а)докладний опис якого даний в п. 2.8.
Якщо
реакцію об'єкту на
 позначити через
позначити через
 (вагова функція)а реакцію на
черезЌ
(вагова функція)а реакцію на
черезЌ
 (наближена
вагова функція), то на підставі принципу
суперпозиції можна записати вихідний
сигнал на імпульс :
(наближена
вагова функція), то на підставі принципу
суперпозиції можна записати вихідний
сигнал на імпульс :
|

|
Рис. 3.12 Представлення вхідного (а) і вихідного сигналів (б) |
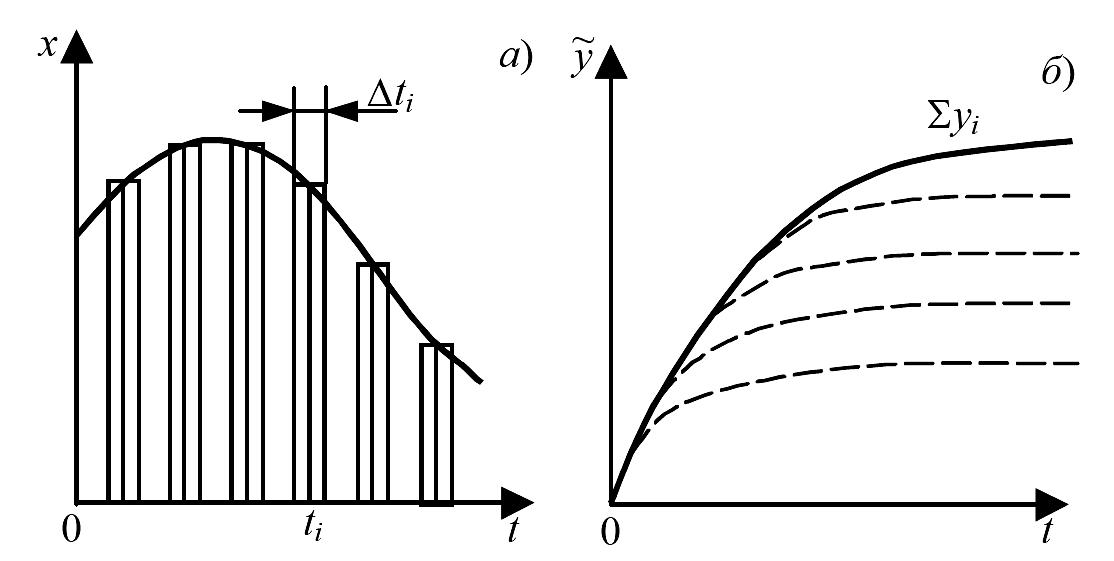
Заміна
вхідного сигналу
набором імпульсів, висота яких співпадає
з відповідними координатами (рис.
3.12), дозволяє
записати реакцію на ступінчасту функцію
на
 підставі принципу суперпозиції
підставі принципу суперпозиції
|

Якщо
тепер спрямувати ,
при цьому
,
при цьому ,
,
 ,
,
 ;
;
 а
а
 ,
де
–
безперервний
параметр, що показує зрушення кожного
імпульсу, то остаточно отримуємо:
,
де
–
безперервний
параметр, що показує зрушення кожного
імпульсу, то остаточно отримуємо:
|
(3.13) |
 .
.
Останнє рівняння називається інтегралом Дюамеля (рівнянням згортки), що відображає зв'язок між входом, виходом об'єкту і його ваговою функцією.
По
суті справи вагова функція є пам'яттю
об'єкту, яка показує, як довго і як сильно
впливає на об'єкт імпульсне збурення,
подане на його вхід у момент часу
 .
З фізичного сенсу вагової функції верхня
межа інтеграції може бути замінена на
оскільки
неможливо представити реальну систему,
в якій на вихідну координату в теперішній
час впливають збурення, які з'являються
в подальші моменти часу.
.
З фізичного сенсу вагової функції верхня
межа інтеграції може бути замінена на
оскільки
неможливо представити реальну систему,
в якій на вихідну координату в теперішній
час впливають збурення, які з'являються
в подальші моменти часу.
Якщо
провести заміну у формулі (3.13)
 ,
, ,
то
можна записати симетричну формулу
,
то
можна записати симетричну формулу
|
(3.14) |
Якщо для представлення вхідного сигналу використовувати не формулу (2.26), а (2.27), то інтеграл Дюамеля записується через перехідну функцію:
|
(3.15) |
або
|
Перетворення Лапласа
Основним математичним апаратом, який використовується в теорії автоматичного управління, є спеціальний метод прикладного аналізу, так званий операційний метод, в основі якого лежить функціональне перетворення Лапласа.
Визначення перетворення Лапласа
Перетворенням
Лапласа називається перетворення
функції
змінної
у функцію
 іншої змінної
іншої змінної за допомогою оператора, визначуваного
співвідношенням
за допомогою оператора, визначуваного
співвідношенням
|
(3.16) |
де
– оригінал
функції;
– зображення
по Лапласу функції
;
–
комплексна
змінна
 .
.
Формула (3.16) визначає пряме перетворення Лапласа. Можливе і так зване зворотне перетворення Лапласа, що дозволяє по зображенню знайти оригінал. Воно визначається співвідношенням
|
(3.17) |
де
 –
абсциса збіжності функції
.
–
абсциса збіжності функції
.
Для більшості функцій, що зустрічаються на практиці, складені таблиці відповідності між оригіналами і зображеннями. Зображення деяких функцій, що найбільшчасто зустрічаються, в теорії управління приведені в табл. 3.1. Якщо ж функція відсутня в таблиці, то її зображення можна отримати безпосередньо, користуючись співвідношенням (3.16).
Приклад
3.1 Потрібно
знайти перетворення Лапласа від функції
 .
.
Згідно визначенню перетворення Лапласа (3.16) маємо
|

Таким
чином,
 .
.
Таблиця перетворення Лапласа
№ |
Оригінал |
Зображення |
№ |
Оригінал |
Зображення |
1 |
|
1 |
8 |
|
|
2 |
1 |
|
9 |
|
|
3 |
|
|
10 |
|
|
4 |
|
|
11 |
|
|
5 |
|
|
12 |
|
|
6 |
|
|
13 |
|
|
7 |
|
|
|
|
|























Широке застосування перетворення Лапласа обумовлене тим, що зображення деяких функцій виявляється простішим за їх оригінали і ряд операцій, таких як інтегрування, диференціювання над зображеннями простіше, ніж відповідні операції над оригіналами.