

14. Контактные датчики с дискретным выходным сигналом
- их электрическое сопротивление изменяется в зависимости от входной механической величины. Так как сопротивление изменяется скачком (в результате замыкания или размыкания контактов), то они имеют дискретный выходной сигнал. Статическая характеристика контактного датчика имеет релейный характер. Они применяются в основном в системах автоматического контроля и сортировки размеров, в системах автоматической сигнализации различных физ величин, преобразуемых в перемещение.
П
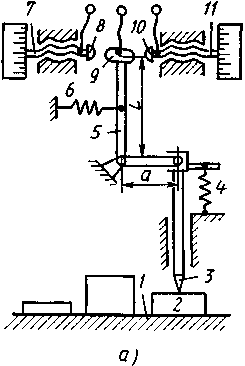
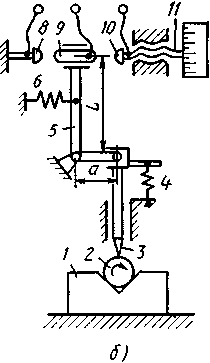
Амплитудный (измеряет отклонения детали от заданной геометрической формы) Подвижный контакт 9 имеет осевое перемещение в направляющих рычага 5. При вращении детали 2 в призме 1 сначала происходит замыкание подвижного контакта 9 с неподвижным контактом 8. Если щуп 3 продолжает подниматься, то рычаг перемещается влево, проскальзывая через подвижный контакт 9. Затем, когда максимальный размер будет пройден (т. е. щуп начнет опускаться), рычаг переместится вправо, увлекая за собой без проскальзывания подвижный контакт. Если отклонение размера превышает допустимое, то подвижный контакт замкнется со вторым неподвижным контактом 10 и в электрическую цепь подается сигнал о том, что деталь бракованная. На предельное отклонение размера датчик настраивают с помощью винта 11, используя эталонную деталь.
Н
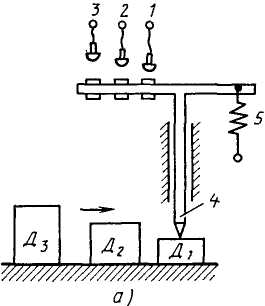
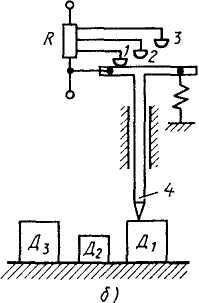
Многопредельные. Контакты 1—3 замыкаются последовательно друг за другом при перемещении измерительного щупа 4, контролирующего соответственно размеры деталей Д1—Д3. Подсоединение подвижного контакта во внешнюю цепь осуществляется с помощью пружинного подвода 5. Контактный датчик, приведенный на а, переключает несколько цепей сигнализации, а датчик на б выполняет последовательное замыкание частей резистора R, имеющего несколько отводов.
В последнем случае происходит ступенчатое уменьшение активного сопротивления, включенного в общую внешнюю цепь. Используют в сортировочных автоматах, разделяющих детали по размерам с достаточно высокой точностью (несколько микрометров).
Достоинства: простота и дешевизна конструкции, простота регулировки чувствительности, высокая точность, возможность работы в цепях постоянного и переменного токов. Недостатки: трудность обеспечения высокой надежности из-за наличия электрической дуги и искрения, возможность ложных срабатываний при наличии вибраций и ударной нагрузки.