

4. Динамические характеристики
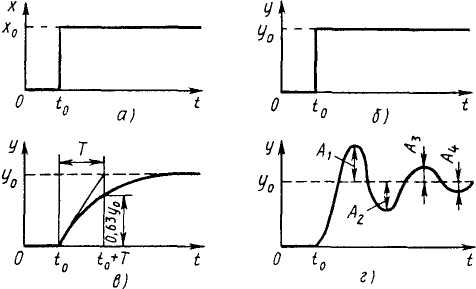
Переход системы из одного установившегося режима в другой с иными значениями входного и выходного сигналов называют динамическим режимом или переходным процессом. Переходной характеристикой называют зависимость выходного сигнала от времени y(t) при скачкообразном изменении входного сигнала.
В
момент времени t0
входной
сигнал скачком изменяется от нуля до
х0
(а).
Если
элемент автоматики является безынерционным,
то в тот же момент времени t0
выходной
сигнал скачком изменяется от нуля до
![]() (б).
Электромеханические
элементы обладают инерционностью,
которая тем больше, чем больше масса
подвижных частей или индуктивность
обмотки, тогда изменение выходного
сигнала запаздывает по сравнению с
изменением входного (в).
(б).
Электромеханические
элементы обладают инерционностью,
которая тем больше, чем больше масса
подвижных частей или индуктивность
обмотки, тогда изменение выходного
сигнала запаздывает по сравнению с
изменением входного (в).
П
Уравнение переходной характеристики:
![]()
Разницу между значениями выходного сигнала в динамическом и установившемся режимах называют динамической погрешностью.
Во
время переходного процесса могут
возникнуть и колебания выходного
сигнала. График колебательного затухающего
переходного процесса на рис. г.
Изменение
выходного сигнала происходит относительно
значения у0.
Амплитуда
этих колебаний постепенно уменьшается,
затухает. Для количественной оценки
этого процесса вводят понятие коэффициента
затухания
![]() .
При незатухающем колебательном процессе
.
При незатухающем колебательном процессе
![]() и коэффициент затухания
и коэффициент затухания
![]() = 0. Система автоматики является при этом
неустойчивой. Если же коэффициент
затухания стремится к единице, то
переходный процесс будет апериодическим
(в).
= 0. Система автоматики является при этом
неустойчивой. Если же коэффициент
затухания стремится к единице, то
переходный процесс будет апериодическим
(в).
5. Обратная связь в системах автоматики
При последовательном соединении элементов выходной сигнал одного элемента является входным сигналом для последующего элемента. Ко6 = К1 К2. При параллельном соединении один и тот же сигнал является входным для двух элементов, а их выходные сигналы суммируются. Ко6 = К1 +К2
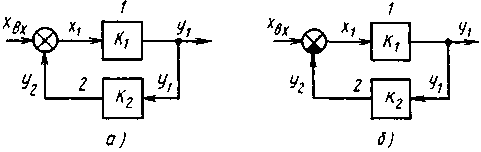
При соединении с обратной связью выходной сигнал одного элемента подается на его вход через элемент обратной связи. В зависимости от знака сигнала обратной связи различают положительную и отрицательную обратную связь. Элемент 1 включен в прямую цепь, элемент 2 — в обратную. Можно сказать, что элемент 1 охвачен обратной связью.
К
![]() .
Выходной сигнал элемента 1
равен
произведению его входного сигнала на
коэффициент преобразования:
.
Выходной сигнал элемента 1
равен
произведению его входного сигнала на
коэффициент преобразования:
![]()
Этот
сигнал поступает на вход элемента 2,
включенного
в цепь обратной связи. Выходной сигнал
элемента 2
можно
получить умножив сигнал ух
на
коэффициент преобразования элемента
2:
![]() .
Подставив
значение у2
в
выражение для
.
Подставив
значение у2
в
выражение для
![]() ,
т. е.
,
т. е.
![]() ,
и преобразовав его, получим
,
и преобразовав его, получим
![]() или
или
![]()
Общий
коэффициент преобразования по определению
равен отношению выходного сигнала ко
входному
![]() .
.
Благодаря положительной обратной связи получен более высокий коэффициент усиления. Положительная обратная связь чаще всего используется в усилительных элементах автоматики.
На принципе отрицательной обратной связи основана работа систем автоматического регулирования (САР). Покажем это на примере элемента сравнения ЭС, в котором происходит вычитание выходного сигнала y(t) из входного сигнала g(t).. Благодаря отрицательной обратной связи обеспечивается автоматическое поддержание регулируемой величины на заданном уровне, постоянно определяется отклонение y(t) от g(t) и вырабатывается соответствующее этому отклонению регулирующее воздействие. В САР в цепь обратной связи включен датчик. Усилительные и исполнительные элементы автоматики включены в прямую цепь.
![]() При
Кпр
Кд
>>
1
При
Кпр
Кд
>>
1
![]()
От точности датчика зависит точность всей работы САР.