

18. Магнитоупругие датчики Индукционные датчики
П
![]()
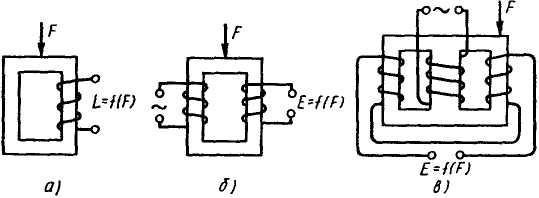
![]() изменится. Изменятся магнитное
сопротивление сердечника, и индуктивность
обмотки на сердечнике. Относительная
деформация
изменится. Изменятся магнитное
сопротивление сердечника, и индуктивность
обмотки на сердечнике. Относительная
деформация
![]() в зоне упругих деформаций связана с
механическим напряжением σ через модуль
упругости Е:
в зоне упругих деформаций связана с
механическим напряжением σ через модуль
упругости Е:
![]()
![]() (200-300).
(200-300).
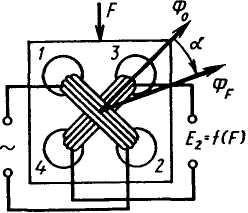
Тензометрический МД с взаимно перпендикулярными обмотками. Первичная обмотка, проходящая через отверстия 1 и 2, при отсутствии механической нагрузки (F= 0) создает магнитный поток Ф0, не сцепленный с витками вторичной обмотки, проходящей через отверстия 3 и 4.Под действием усилия F в основном изменяется магнитная проницаемость в направлении сжатия, что вызывает поворот вектора магнитной индукции на угол α и одновременно изменение магнитного потока ФF. Этот поток уже пересекает плоскость вторичной обмотки, на выходе которой появляется ЭДС E2.
Достоинства: высокая чувствительность, возможность измерения больших усилий. Недостатки: наличие температурной погрешности, вызванной влиянием температуры окружающей среды на магнитные свойства сердечника; наличие погрешности, вызванной влиянием гистерезиса (как магнитного, так и механического, связанного с остаточной деформацией); наличие погрешности, вызванной колебаниями напряжения питания.
Магнитострикционный эффект: ферромагнитное тело, помещенное в магнитное поле, изменяет свои геометрические размеры, т. е. в нем появляются механические деформации.
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Принцип действия основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
В
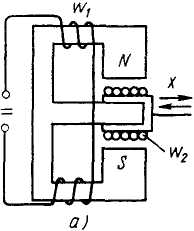
а-
схема
датчика с обмоткой w2,
размещенной в воздушном зазоре, в котором
постоянный магнитный поток Ф
создается катушкой w1,
включенной на постоянное напряжение
U=.
При перемещении катушки в магнитном
поле в ней индуцируется ЭДС, пропорциональная
скорости перемещения:![]() ,
где k
—
коэффициент пропорциональности,
зависящий от числа витков
,
где k
—
коэффициент пропорциональности,
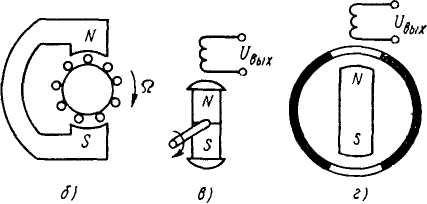
зависящий от числа витков![]() и
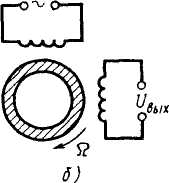
конструктивных параметров датчика. б-
датчик, в котором постоянный магнитный
поток создается с помощью постоянного
магнита с полюсными наконечниками. ЭДС,
индуцируемая во вращающейся катушке,
пропорциональна скорости вращения Ω:
и
конструктивных параметров датчика. б-
датчик, в котором постоянный магнитный
поток создается с помощью постоянного
магнита с полюсными наконечниками. ЭДС,
индуцируемая во вращающейся катушке,
пропорциональна скорости вращения Ω:
![]() В
обоих этих датчиках катушки подвижны,
поэтому для отвода от них выходного
сигнала (ЭДС) необходимы гибкие токоподводы
или контактные кольца со щетками.
В
обоих этих датчиках катушки подвижны,
поэтому для отвода от них выходного
сигнала (ЭДС) необходимы гибкие токоподводы
или контактные кольца со щетками.
С
![]()
Т
![]() .
Частота вращения п
обычно
выражается в 1/мин (количество оборотов
в минуту) и связана со скоростью вращения
Ω
.
Частота вращения п
обычно
выражается в 1/мин (количество оборотов
в минуту) и связана со скоростью вращения
Ω
![]() С
помощью коллектора и щеток выходной
сигнал подается на нагрузку в виде
выпрямленного напряжения.
С
помощью коллектора и щеток выходной
сигнал подается на нагрузку в виде
выпрямленного напряжения.
Тахогенератор переменного тока имеет на статоре две обмотки, сдвинутые одна относительно другой на 90 эл. град. Одна обмотка включается в сеть переменного тока. При вращении ротора, выполненного в виде тонкостенного электропроводящего цилиндра, в другой обмотке наводится переменная ЭДС, которая пропорциональна частоте вращения п.. Обладают высокой чувствительностью и мощностью выходного сигнала. Недостаток: зависимость выходного сигнала от сопротивления нагрузки.