15. Потенциометрические датчики
-
предназначены для преобразования
механического перемещения в электрический
сигнал. Основной частью датчика является
реостат, сопротивление которого
изменяется при перемещении движка,
скользящего по проволоке.
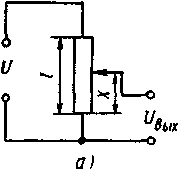
Напряжение
питания подается на всю обмотку реостата
через неподвижные выводы этой обмотки.
Выходное напряжение, пропорциональное
перемещению движка, снимается с одного
из неподвижных выводов и с подвижного
движка. Схема называется потенциометрической
или схемой делителя напряжения.
Е
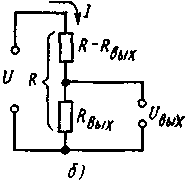
сли сопротивление всей обмотки
датчика обозначить через R,
а
сопротивление части этой обмотки, с
которой снимается выходное напряжение,
через
 ,
то ПС включения датчика м/б представлена
как последовательное соединение
резисторов с сопротивлением
и
,
то ПС включения датчика м/б представлена
как последовательное соединение
резисторов с сопротивлением
и
 .
Ток через
обмотку датчика
.
Ток через
обмотку датчика
 ,
а приложенное
напряжение распределяется между
последовательно соединенными резисторами:
,
а приложенное
напряжение распределяется между
последовательно соединенными резисторами:
 .
.
Если
сопротивление обмотки равномерно
распределить по длине
 ,
а перемещение движка обозначить через
х,
то
выходное напряжение датчика
,
а перемещение движка обозначить через
х,
то
выходное напряжение датчика
Выходной
сигнал датчика пропорционален перемещению
движка.
Наличие
скользящего контакта снижает надежность.
Для питания датчика м/б использовано
как U
постоянного тока, так и U
переменного тока невысокой частоты.
Входным сигналом датчика м/б линейное
и угловое перемещение.
К
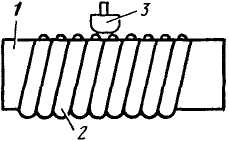
онструктивно линейного ПД состоит
из каркаса 1,
на который
намотана в один слой обмотка 2
из тонкого
провода. По виткам обмотки скользит
движок (щетка) 3,
который
механически связан с объектом, перемещение
которого надо измерить. Обмотка выполнена
из изолированного провода, а дорожка,
по которой скользит движок, предварительно
очищена от изоляции. Каркас выполнен
обычно плоским или в виде цилиндра.
Материалом каркаса может быть изолятор
(пластмасса, керамика) или металл,
покрытый слоем изоляции. Металлические
каркасы благодаря лучшей теплопроводности
позволяют получить большую мощность
электрического сигнала на выходе
датчика.
П

Д угловых перемещений состоит из
каркаса 1
с обмоткой
2, по
которой скользит движок 3.
Для съема
сигнала с перемещающегося движка служит
добавочная щетка 4,
скользящая
по токосъемному кольцу 5. Выходное
напряжение датчика угловых перемещений
пропорционально углу поворота подвижной
части первичного измерителя, соединенного
с осью движка
Д
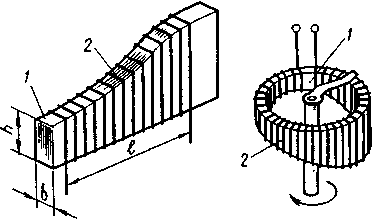
ля получения выходного сигнала,
изменяющегося по определенному закону,
применяют функциональные ПД. Зависимость
сопротивления обмотки от перемещения
движка является нелинейной. Изоляционный
каркас 1
имеет небольшую постоянную толщину b,
а высота его h
изменяется
по длине намотки l.
На каркас наматывается проволока 2
с высоким
удельным сопротивлением. При входных
сигналах в виде угловых перемещений
каркас с непрерывной обмоткой изгибают
в цилиндр. Напряжение питания подается
на концы обмотки. Выходное напряжение,
функционально зависящее от перемещения
движка х,
снимается
между одним из концов обмотки и движком.
 определяется
формой выреза каркаса потенциометра,
т. е. зависимостью его профиля (высоты
h)
от перемещения движка х.
определяется
формой выреза каркаса потенциометра,
т. е. зависимостью его профиля (высоты
h)
от перемещения движка х.

