

21. Возможные перемещения и возможные скорости материальной точки и механической системы. Примеры.
Для одной материальной точки возможное перемещение вводится как бесконечно малое воображаемое перемещение, допускаемое связями в данный момент времени; это – векторная величина, совпадающая по направлению с возможной скоростью точки.
Для механической системы возможное перемещение определяется как совокупность возможных перемещений всех точек системы. При этом каждая точка системы, как и в случае отдельной точки, получает возможное перемещение, совпадающее по направлению с ее возможной скоростью.
Число независимых возможных перемещений системы называется числом ее степеней свободы.
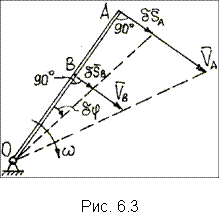
Вращательное движение тела. Как известно, скорость любой точки твердого тела при вращательном движении (рис. 6.3) направлена перпендикулярно расстоянию, соединяющему эту точку с осью вращения, и равна по модулю произведению угловой скорости на расстояние точки до оси вращения:
![]() Аналогично:
Аналогично:
![]()
где – угол δϕ бесконечно малого поворота тела вокруг оси, проходящей через точку О.
Так же, как и скорости, возможные перемещения точек А и В прямо пропорциональны их расстоянию до оси вращения:
![]()
Плоскопараллельное движение тела. Известно, что плоскопараллельное движение твердого тела в данный момент времени может рассматриваться как бесконечно малый поворот вокруг мгновенного центра скоростей. Следовательно (рис. 6.4):
![]() где Р – мгновенный центр скоростей
тела.
где Р – мгновенный центр скоростей
тела.
Поэтому:
![]()
Кроме
того, можно использовать теорему о
проекциях скоростей, согласно которой
проекции скоростей двух точек плоской
фигуры на прямую, соединяющую их, равны
между собой. Возможные перемещения
(рис. 6.5) связаны аналогичным соотношением
![]() или
или
![]() .
.
рис.
6.4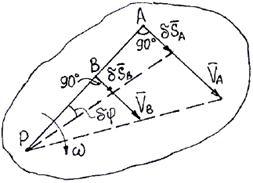 рис. 6.5
рис. 6.5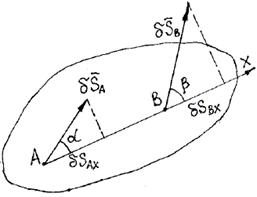
22. Принцип возможных перемещений.
Для равновесия механических систем с идеальными стационарными связями необходимо и достаточно, чтобы сумма элементарных работ всех активных сил системы на любом возможном перемещении была равна нулю.
При использовании различных способов вычисления элементарной работы уравнение, выражающее принцип возможных перемещений, может быть записано в следующих формах:
![]()
![]()
Если
на систему действуют пары сил с моментами
![]() , то уравнение принципа записывается в
форме:
, то уравнение принципа записывается в
форме:
![]()
Связи системы называются идеальными, если сумма работ всех сил реакции на любом возможном перемещении равна нулю. Примерами идеальных связей являются: гладкая поверхность при скольжении по ней твердого тела, абсолютно шероховатая поверхность при качении тела, шарниры без трения и т. п.
Принцип возможных перемещений используется для исследования состояний равновесия механических систем. Если система имеет одну степень свободы, для нее можно составить одно уравнение, выражающее принцип возможных перемещений; если же система имеет две (или более) степени свободы, то для нее можно соответственно составить два (или более) уравнения, выражающих этот принцип.
23. Обобщённые координаты и обобщённые скорости. Обобщённые силы.
Если механическая система состоит из n точек, то её положение в любой момент времени можно определить при помощи 3n координат.
Если можно составить k уравнений связи:
f1(x1,y1,z1,x2,y2,z2,…,xn,yn,zn)
………………………………………….
fk(x1,y1,z1,x2,y2,z2,…,xn,yn,zn)
то положение системы в любой момент времени можно определить меньшим числом координат, количество которых равно числу степеней свободы s:
s=3n-k,
где n – число точек в системе; k – число уравнений связей.
Независимые переменные, которыми определяется положение системы, называются обобщёнными координатами и обозначаются:
q1,q2,q3,…..,qs [м],[рад]
Число обобщённых координат равно числу степеней свободы.
Поскольку обобщённые координаты системы меняются по времени, т.е. qi =qi(t), то можно вычислить обобщённые скорости:
![]() [м/с], [рад/с]
[м/с], [рад/с]
Через обобщённые координаты можно выразить работу сил:
![]() [Н·м]
[Н·м]
Величина Q, имеет смысл силы и называется обобщённой силой.