

ТеорМех. Динамика. Билеты.
1. Основные законы динамики. Инерциальная система отсчёта.
1. Закон инерции: материальная точка сохраняет состояние покоя или равномерного прямолинейного движения без воздействия на неё каких-либо внешних сил.
Так же воздействие на точку каких-либо скомпенсированных, уравновешенных сил, не изменит её состояния.
Такая точка называется изолированной.
2. Основной закон динами: ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление.
![]()
3. Закон равенства действия и противодействия: силы взаимодействия двух материальных точек равны по величине и противоположены по направлению.
![]()
4. Закон независимости сил (суперпозиция): Несколько одновременно действующих на точу сил сообщают ей такое ускорение, которое сообщила бы одна ей одна, равная их геометрической сумме.
![]() .
.
Инерциальная система отсчёта:
Это такая система отсчёта, в которой выполняется закон инерции.
2. Дифференциальные уравнения движения свободной материальной точки в декартовых координатах. Две основные задачи динамики и метод их решения.
Дифференциальные уравнения:
![]()
Две основные задачи динамики точки:
Первая задача динамики.
По заданному закону движения точки определить силу при известной массе.
![]() -
уравнения движения точки
-
уравнения движения точки
Решается методом дифференцирования.
Вторая задача динамики.
Решение второй задачи динамики составляет основное содержание всех разделов динамики.
По заданным силам определить движение точки. Задача решается методом интегрирования.
Если сила зависит только от t или только от x или V, то можно пользоваться следующими указаниями:
1) составить диф.уравнение движения точки:
а) начало координат совмещать с началом движения точки (или с её равновесным положением);
б) если движение по прямой, то одну из осей направить в сторону движения точки;
в) точку изобразить с приложенными силами в произвольном положении;
г) составить диф.уравнение в проекции на ось.
2) интегрирование диф.уравнения.
![]() Замена переменных.
Замена переменных.
![]() если
если![]()
![]() если
если![]()
![]()
Диф.уравнение решать методом разделения переменных(кроме задач на колебания).
3) интегралы брать неопределёнными, учитывая постоянные интегрирования, найденные из начальных условий.
4) анализ движения точки.
3. Динамика относительного движения материальной точки. Силы инерции.
Во многих задачах динамики движение материальной точки рассматривается относительно системы отсчета, движущейся относительно инерциальной системы отсчета.
П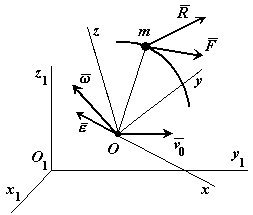 олучим
дифференциальные уравнения движения
материальной точки относительно
подвижной системы отсчета.
олучим
дифференциальные уравнения движения
материальной точки относительно
подвижной системы отсчета.
![]() -
инерциальная система отсчета.
-
инерциальная система отсчета.
![]() -
подвижная система отсчета.
-
подвижная система отсчета.
![]() ,
,
где
![]() - сумма активных сил,
- сумма активных сил,
![]() - сумма сил реакции связи.
- сумма сил реакции связи.
В случае сложного движения точки, её ускорение является абсолютным и складывается из относительного, переносного и кориолисова
Согласно
теореме Кориолиса
![]()
Перепишем дифференциальное уравнение следующим образом
![]()
Введем обозначения
![]() -
переносная сила инерции,
-
переносная сила инерции,
![]() -
кориолисова(поворотная) сила инерции.
-
кориолисова(поворотная) сила инерции.
С учетом этих обозначений мы получаем динамическую теорему Кориолиса (уравнения относительного движения).
Материальная точка движется относительно неинерциальной системы отсчета так же как и относительно инерциальной, только к приложенным активным силам и силам реакции связей следует добавить кориолисову и переносную силу инерции.
![]()
Силы
![]() и
и
![]() являются поправками на неинерционность
системы.
являются поправками на неинерционность
системы.
В проекциях на подвижные оси
![]()
![]()
![]()
4. Центр масс механической системы. Теорема о движении центра масс, случаи сохранения движения центра масс. Дифференциальные уравнения поступательного движения твёрдого тела.
Центр
масс системы – геометрическая
точка, положение которой определяется
радиус-вектором
![]() .
.
 ,
где
,
где
![]()
Теорема о движении центра масс системы: центр масс системы движется так же, как точка, масса которой равна массе всей системы под действием сил, приложенных к системе.
![]()
![]() - внешние силы, действуют на систему
со стороны других тел не входящих в
систему.
- внешние силы, действуют на систему
со стороны других тел не входящих в
систему.
![]() - внутренние силы, силы взаимодействия
между точками одной и той же системы.
- внутренние силы, силы взаимодействия
между точками одной и той же системы.
Равны нулю по свойствам внутренних сил.
Случаи сохранения: Если главный вектор внешних сил равен нулю, то центр масс системы находится в состоянии покоя или движется равномерно и прямолинейно.
Дифф. Уравнение поступательного движения тв. Тела
Если механическая система представляет собой твёрдое тело, то при поступательном движении скорости и ускорения всех точек в данный момент времени будут иметь одинаковые по модулю и направлению ускорения.
![]()
М – масса системы, F – главный вектор внешних сил.
5. Количество движения материальной точки и механической системы. Теорема об изменении количества движения в дифференциальной форме. Случаи сохранения количества движения.
Количеством
движения материальной точки
![]() называется вектор, равный произведению
массы точки
называется вектор, равный произведению
массы точки
![]() на ее скорость
на ее скорость
![]() .
. ![]()
Единицей
измерения количества движения в СИ
является –
![]()
Количество движения механической системы – вектор, численно равный главному вектору количества движения всех точек системы.

Теорема об изменении количества движения в диф. форме:
Производная от количества движения механической системы по времени равна главному вектору всех внешних сил, действующих на систему.
![]()
Случаи сохранения кол-ва движения:
1. Если главный вектор внешних сил равен нулю, то количество движения системы постоянно по величине и направлению.
Q=const F=0
2. Если проекция главного вектора внешних сил на какую-либо ось равна нулю, то проекция вектора количества движения системы на ту же ось постоянна.
Qx=const Fx=0
6. Количество движения материальной точки и механической системы. Импульс силы. Теорема об изменении количества движения в интегральной форме.
Количеством движения материальной точки называется вектор, равный произведению массы точки на ее скорость .
Единицей измерения количества движения в СИ является –
Количество движения механической системы – вектор, численно равный главному вектору количества движения всех точек системы.
Импульс силы:
Импульс силы характеризует действие силы на точку в течение некоторого времени.
![]() ,
где S
– полный импульс.
,
где S
– полный импульс. ![]() ,
где S
– элементарный импульс.
,
где S
– элементарный импульс.
Теорема об изменении количества движения в интегральной форме:
Изменение количества движения системы за некоторый промежуток времени равно векторной сумме все импульсов внешних сил, действующих на систему.
![]() ,
где S
– импульс внешних сил.
,
где S
– импульс внешних сил.
7. Момент инерции механической системы относительно оси. Теорема Гюйгенса-Штейнера. Радиус инерции.
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
![]()
где:
mi — масса i-й точки,
ri — расстояние от i-й точки до оси.
Теорема Гюйгенса-Штейнера
Момент инерции твёрдого тела относительно какой-либо оси зависит не только от массы, формы и размеров тела, но также от положения тела по отношению к этой оси. Согласно теореме Штейнера (теореме Гюйгенса-Штейнера), момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями:
![]()
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:

Радиус инерции - расстояние от оси до воображаемой точки, в которой необходимо сосредоточить массу тела, чтоб момент инерции этой точки относительно заданной оси был равен моменту инерции данного тела относительно этой же оси:
![]() .
.