

2.3 Визуализация полученных результатов средствами Mathcad
2.3.1 Графическое отображение численных результатов (методом Рунге–Кутта)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
2.3.2 Графическое отображение численных результатов (методом Эйлера)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
пороговое воздействие, равное единичному импульсу
начальное условие для внешнего воздействия
параметры передаточных функций
параметр временной передаточной функции
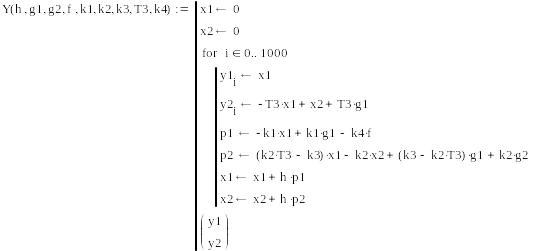
Цикл, задающий динамическое поведение системы методом Эйлера.
![]()
Визуальная интерпретация средствами построенных графиков средой MathCad:

Заключение
В процессе выполнения курсовой работы была реализована математическая модель заданной системы.
Анализ математической модели позволил исследовать исходную систему и получить следующий аналитический результат. Данная многомерная система регулирования является неустойчивой. Однако объект управления наблюдаем и управляем. Для того чтобы система приобрела устойчивость необходимо увеличить численные значения параметров передаточных функций, реализованных в усилительном звене (линейно-усилительные блоки в структуре системы).
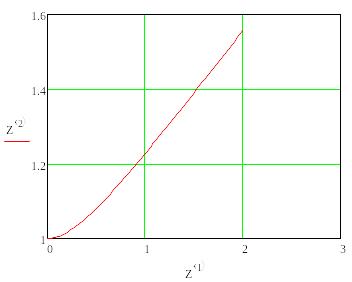
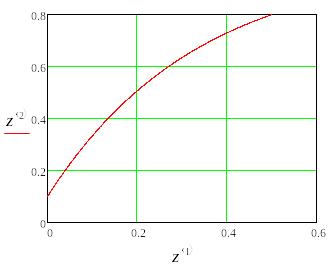
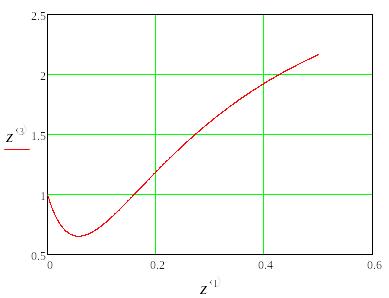
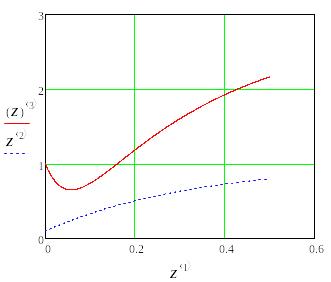
Целью решения полученных дифференциальных уравнений является изучение реакции выходных величин y1(t), y2(t) системы автоматического регулирования на единичные ступенчатые воздействия g1(t), g2(t), f(t). Для наглядного представления результатов следует рассмотреть три решения отдельно для каждого внешнего воздействия: g1(t)=10(t), g2(t)=0, f(t)=0; g1(t)=0, g2(t)=10(t), f(t)=0; g1(t)=0, g2(t)=0, f(t)= 10(t).
Анализ полученных графических результатов выявил характерную особенность, присущую для многомерных систем автоматического регулирования существование влияния какого-либо из внешних воздействий одновременно на несколько регулируемых величин.
Исходя из этого, при синтезе системы необходимо обеспечить независимость управления каждой выходной величиной.
Список используемых источников
1. Пискунов Н.С. Дифференциальное и интегральное исчисление / Н.С. Пискунов. М.: Наука, 1972. Т.1. 429 с.
2. Пискунов Н.С. Дифференциальное и интегральное исчисление / Н..С. Пискунов. М.: Наука, 2003. Т.2. 544 с.
3. Нетушила А.В. Теория автоматического управления / А.В. Нетушила. М.: Высш. шк., 1972.Ч.2. 432 c.
4. Яковлева В.Б. Теория автоматического управления / В.Б. Яковлева. М.: Высш. шк., 2003.567 c.
5. Соломенцева Ю.М. Теория автоматического управления / Ю.М. Соломенцева. М.: Высш. шк., 2003. 268 c.
6. Гмурман В.Е. Руководство к решению задач по теории вероятностей и математической статистике / В.Е. Гмурман. М.: Высш. шк., 2002. 404 c.
7. Вентцель Е.С. Исследование операций / Е.С. Вентцель. М.: Дрофа, 2004. 208 c.
8. Семенов М.П. Основы численных методов: учеб. пособие / М.П. Семенов, А. А. Катрахова, В. В. Жучкова. Воронеж: ВГТУ, 1997.
9. Мышкис А.Д. Лекции по высшей математики / А.Д. Мышкис . М.: Наука, 1969. 640 c.