

Основные принципы динамического баланса
Каждый компонент, подвешенный на Steadicam, такой как камера, монитор, батарея, грузы, имеет свой вес, имеет влияние на статический и динамический баланс. Каждый компонент также влияет на инерционные качества или «чувствительность» Steadicam.
Steadicam со всеми компонентами можно представить математическими формулами, с помощью которых можно рассчитать и настроить динамический баланс, можно подстраивать и проверять динамический баланс опытным путем, без решения математических уравнений.
В зависимости от модели Steadicam, оператор может варьировать расположение на нем компонентов. Оператор устанавливает компоненты в положение удобное для съемок, и затем настраивает статический и динамический баланс.
Прежде всего, давайте рассмотрим силы, которые влияют на статический баланс и динамическое равновесие.
Рассмотрим объект, который не является Steadicam. Этот пример поможет понять, что такое статический и динамический баланс.
ФИЗИКА И МАТЕМАТИКА
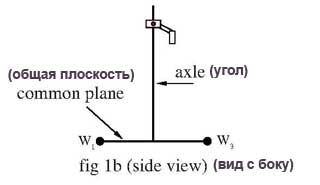
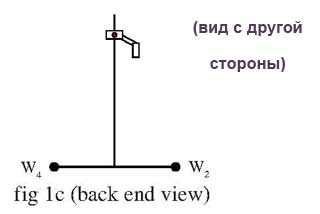
На рисунках (1a), (1b), (1c),
представлены 4 подвешенных на ось
груза, находящихся в одной плоскости.
Ось подвешена на неподвижном карданном
подвесе.
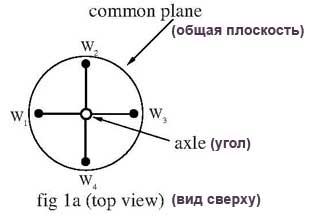
Эти грузы являются компланарными.
Вектора называются компланарными, если они лежат на параллельных плоскостях или на одной плоскости
Если масса грузов W1 = W3 и W2 = W4 и расстояния от оси к грузам (радиусы) равны, то система будет висеть вертикально и находиться в динамическом балансе. Кажется логичным, но почему это не так?
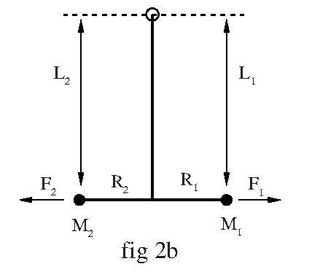
Упрощаем систему до двух, свободно вращающихся грузов, подвешенных на оси. Система на рисунке (2a), представляет собой модель Steadicam без камеры, закрепленную на карданном подвесе.
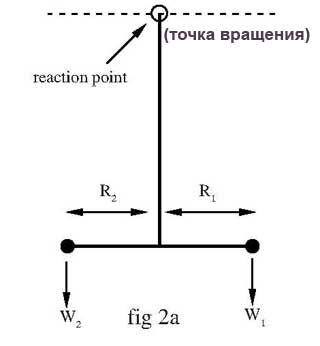 На
рисунке показаны силы гравитации,
действующие на грузы. Система будет
висеть вертикально если
На
рисунке показаны силы гравитации,
действующие на грузы. Система будет
висеть вертикально если
(1) W1R1= W2R2 - Это основная формула для статического баланса.
Сила гравитации постоянно действует на систему. Если мы приводим систему в движение, то на систему начинает действовать центробежная сила.
Уравнение центробежной силы: F=MRΩ2
Где
М – масса грузов
R – радиус от оси до груза
Ω - угловая скорость (ед. изм. оборотов в минуту)
Центробежные силы F1 и F2, действуют на объект в направлении стрелок. Важно понимать, что центробежные силы не приводят систему во вращение, а создаются из-за вращения и растут с увеличением квадрата угловой скорости.
Если система находится в статическом балансе. (W1R1 = W2R2) Она может находиться в динамическом равновесии, если действие двух центробежных сил равны.
(3) F1L1 = F2L2
Но в уравнении F1 не равно F2 , поскольку центробежная сила отклоняющая грузы в сторону, зависит от того, насколько далеко от оси точки подвеса находятся эти грузы.
Вы можете провести эксперимент со своим Steadicam , чтобы наглядно понять, почему дистанция от грузов до оси точки подвеса так важна. Подвесьте Steadicam без камеры, добейтесь статического баланса. Приложите пальцем усилие к центральной стойке, как можно ближе к точке подвеса Steadicam. Усилие даст небольшое отклонение системы. Теперь приложим такое же усилие вдалеке от точки подвеса. Заметьте, оно дало намного больший эффект!
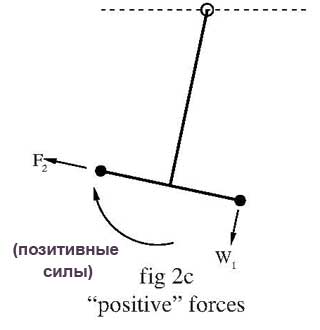
Давайте посмотрим, какие силы действуют на нашу систему при вращении. Мы назовем силы «позитивными», если они действуют на систему, как показано на рисунке (2c).
Силы на рисунке (2d), назовем «негативными».
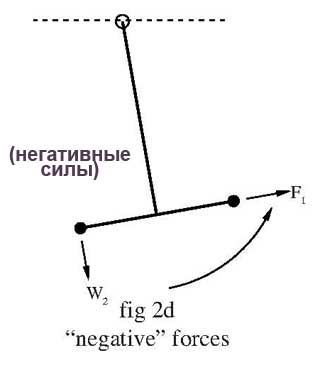
Если «негативные» силы равны «позитивным» - система находится в динамическом равновесии.
(4a) F2L2 + W1R1= F1L1 + W2R2
Заменим F на MRΩ2 и получим:
(4b) (M2R2Ω2)L2 + W1R1= (M1R1 Ω2)L1 + W2R2
Поскольку масса у грузов одинакова, мы можем заменить W на M.
(4c) (W2R2Ω2)L2 + W1R1= (W1R1) Ω2L1 + W2R2
В дальнейшем мы будем возвращаться к формуле (4с) снова, так как это основная формула для динамического баланса.
Теперь рассмотрим рисунок (2e):
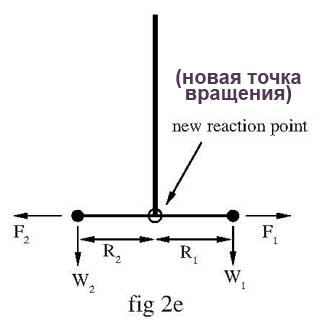
Мы поместили точку вращения на одну ось с грузами. Теперь L = 0. И центробежные силы не будут действовать на систему, даже если они не равны!
Если L2 и L1 равны нулю.
(4d) (W2R2)Ω20 + W1R1= (W1R1Ω2)0+ W2R2
Мы получаем: W1R1 = W2R2
На рисунке (2e), система отклонится только тогда когда статические силы W1R1 и W2R2 будут не равны.
Теперь рассмотрим другую систему с двумя грузами. Но теперь эти грузы не будут равны. На рисунке (3а) представлен Steadicam с поднятым вверх монитором. Ради интереса мы также изменили радиусы расположения грузов от оси.
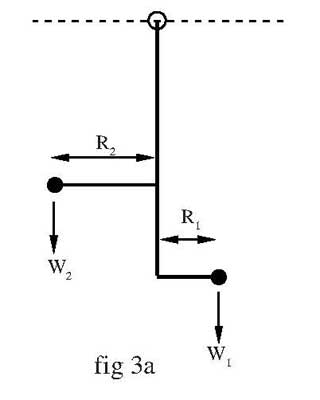 Система
останется вертикальной, если статические
силы равны.
Старая формула: (1) W1R1
= W2R2.
Система
останется вертикальной, если статические
силы равны.
Старая формула: (1) W1R1
= W2R2.
Заметим, что на статический баланс не влияет то, насколько выше груз W2 находится над грузом W1.
В формуле для статического
баланса нет высоты грузов (L).
На
рисунке (3b), показаны центростремительные
силы, действующие на систему.
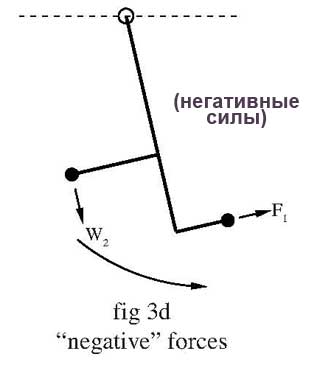
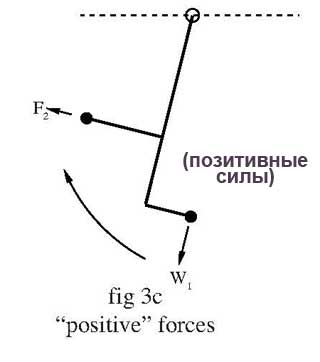
 На
рисунке (3с) показаны «позитивные» силы,
а на (3d) – «негативные» силы, действующие
на систему.
На
рисунке (3с) показаны «позитивные» силы,
а на (3d) – «негативные» силы, действующие
на систему.
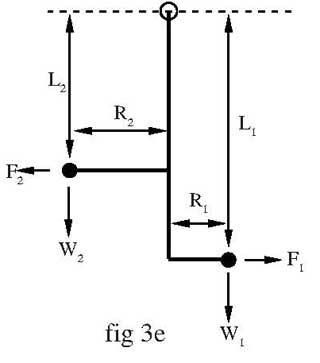
На рисунке (3e) показаны все силы, действующие на систему.
Система находится в динамическом равновесии, если:
(4a) F2L2 + W1R1= F1L1 + W2R2
Но этого не может быть. Почему?
Вспомним. F=MRΩ2
Заменим W на M.
Мы имеем:
(4c) (W2R2Ω2)L2 + W1R1= (W1R1)Ω2L1 + W2R2
Если система находится в статическом балансе:
W1R1 = W2R2
Таким образом, уравнение (4c) становится:
(4f) (W2R2)Ω2L2 = (W1R1Ω2)L1
Все члены уравнения с левой и с правой стороны равны, кроме L1 и L2. Поскольку L2 меньше L1, следовательно, и (W2R2)Ω2L2 меньше, чем (W1R1Ω2)L1 и уравнение не может быть удовлетворено. Это означает что массы находящиеся на разных горизонтальных плоскостях могут быть в статическом равновесии, но не находиться в динамическом балансе.
Но, имея систему Steadicam из трех и более грузов, даже подвешенных не в одной плоскости, система Steadicam может быть уравновешена динамически!
Теперь дадим условные названия нашим грузам. Камера, монитор, батарея. И посмотрим, какие статические и динамические силы действуют на них. На рисунке (4а), представлена простая система Steadicam и показаны силы, действующие на нее.
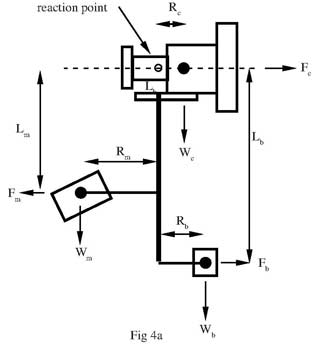
На рисунке центр тяжести камеры смещен вправо по отношению к центральной стойке. Но в действительности мы не знаем, где он должен находиться. Чтобы находиться в статическом балансе, статические силы должны уравновешивать друг друга:
(5) – WmRm + WbRb+ WcRc = 0
Также все силы должны быть уравновешены, если система находится в динамическом балансе:
(6a) FmLm – WmRm– FbLb + WbRb– FcLc + WcRc = 0
Заменим F на MRΩ2 .
(6b) (WmRmΩ2)Lm – WmRm– (WbRbΩ2)Lb + WbRb– (WcRcΩ2)Lc + WcRc = 0
Получаем слишком много переменных! Однако если выбрать другую точку вращения, мы сможем решить уравнение.
Переместим центр массы камеры в точку вращения системы.
Теперь Lc = 0. Поэтому
(WcRcΩ2)Lc = 0.
И если система находится в статическом балансе:
WmRm + WbRb + WcRc = 0
Таким образом, из уравнения (6b) мы удаляем «нулевые» элементы и получаем уравнение(7а).
( 7a) (WmRmΩ2)Lm– (WbRbΩ2)Lb = 0
Или, говоря по другому:
(7b) (WmRmΩ2)Lm= (WbRbΩ2)Lb
Мы сокращаем Ω, так как угловая скорость (Ω) находится в обоих частях уравнения.
(7c) (WmRm)Lm =(WbRb)Lb
Заметим, что в уравнениях (7а), (7b), (7c), нет коэффициентов, зависящих от массы камеры или ее расположения.
Это значит, что вертикальное положение системы не связано с весом камеры и зависит только от высоты монитора и аккумулятора над точкой подвеса Lm, Lb. Мы будем использовать уравнение (7с) чтобы найти радиус батареи (Rb), а затем уравнение (5), чтобы найти радиус камеры (Rc).
Запомните: точка вращения (подвеса) может быть перемещена в любое место на центральной штанге, не влияя на динамический баланс.
Давайте дадим нашим условным грузам реальный вес.
Wc = 25# Wm = 6# Wb = 5#
Объекты, вес которых мы можем принять в расчет, зависят от конструкции вашего Steadicam.
Lm = 20 inches Lb = 30 inches Rm = 10 inches
Смотрим рисунок (4b).
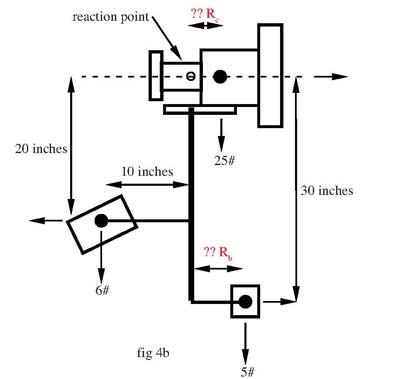
Сначала используем формулу (7c) для нахождения радиуса батареи(Rb).
(7c) (WbRb)Lb = (WmRm)Lm
(7d) Rb = (WmRm)Lm ----------------------- (WbLb)
Rb = (6 x 10) x 20 ---------------- (5 x 30)
Rb = 8 inches
Теперь используем уравнение 5, чтобы найти радиус камеры (Rc)
(5a) – WmRm + WcRc+ WbRb = 0 (5b) WcRc = WmRm – WbRb
(5c) Rc = WmRm – WbRb ------------------------------ Wc
Rc = (6 x 10) – (5 x 8) ----------------- 25
Rc = 0.8 inches
Если мы установим радиус камеры 0,8 дюйма и радиус батареи 8 дюймов. Steadicam будет в статическом и динамическом равновесии, т.е. в динамическом балансе.
Теперь мы можем подтвердить, что перемещение точки вращения (подвеса) не даст никакого эффекта на динамический баланс. Для примера, переместим карданный подвес на 6 дюймов ниже по центральной штанге. Туда, где удобнее будет его использовать.
Используем уравнение (6b).
(6b) (WmRmΩ2)Lm – WmRm– (WbRbΩ2)Lb + WbRb– (WcRcΩ2)Lc + WcRc = 0
Снова система находится в статическом балансе и сумма сил равна нулю. Мы можем сократить Ω2, так как центростремительное ускорение везде равно.
(8) (WmRm)Lm – (WcRc)Lc– (WbRb)Lb = 0
Переместив точку подвеса на 6 дюймов, мы получаем следующие значения для высоты грузов над плоскостью точки подвеса.
Lm = 14, Lc = - 6(минус 6), и Lb = 24
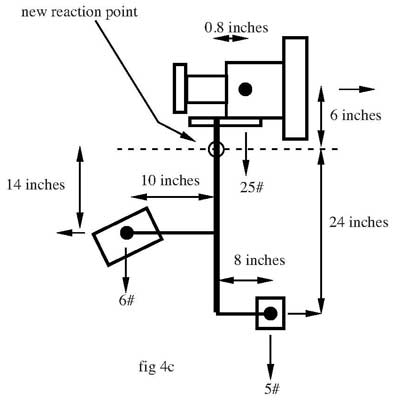
Подставив значения в уравнение (8) мы получаем:
(6 x 10) x 14– (25 x 0.8) x (– 6)– (5 x 8) x 24 = 0
или
840 + 120 – 960 = 0
Тем самым, мы доказали, что положение точки подвеса на центральной штанге не влияет на динамический балансs Steadicam. Этим мы объяснили все элементарные расчеты по физике и математике, которые помогли понять, что такое динамический баланс.
Заметим, что наша математическая модель довольно проста и не включает многих факторов, влияющих на Steadicam. Например, таких, как ветер или неравномерное распределение массы. Например, не все внутренности монитора имеют одинаковую плотность, и в итоге монитор не ведет себя как точечная масса. Формулы являются только моделью реальности. Но зачем мы делали все эти расчеты?
Потому что математика ясно описывает главные силы, действующие на динамический баланс. Используя основные формулы, например, можно рассчитать положение грузов с точностью до 0,25 дюйма. И потом будет достаточно легкой подстройки Steadicam перед работой.
Понимая саму теорию динамического баланса, мы можем быстро и легко поместить компоненты Steadicam в положение, близкое к идеальному динамическому балансу.
Простой метод добиться динамического баланса в любой системе Steadicam. Установите на камеру все, что нужно для съемки. Проверьте, что камера на верхней площадке хорошо уравновешена. Поместите монитор в положение удобное для съемки.
Установите камеру так, чтобы центр тяжести был смещен примерно на 0,75 дюйма от центральной штанги. Поместите систему на стойку и добейтесь, чтобы при отклонении штанги горизонтально, она возвращалась в нижнее положение за время 3 – 4 секунды. Добейтесь точными регулировками, чтобы камера сохраняла ориентацию в пространстве и не начинала вращаться или отклоняться. Для точной подстройки баланса вы можете использовать перемещение батареи. Заставьте систему вращаться, но не быстро. Со скоростью примерно 20 – 40 оборотов в минуту. Если вы точно настроили динамический баланс, система будет вращаться с той скоростью, которую вы хотите, сохраняя плоскость вращения. Запомните положение камеры над центральной штангой, чтобы быстрее настроить систему в следующий раз.
Точное концептуальное понимание, что такое динамический баланс, позволит настроить Steadicam любому оператору, не применяя математические расчёты. Также это облегчит возврат системы в динамический баланс, если были внесены какие то изменения