

2.6. Переходная матрица
Эта характеристика применяется для описания многоканальных систем вида (2.1) - (2.2) при нулевых входных воздействиях, то есть для автономных систем типа:
|
(2.12) |


Переходная матрица - это решение матричного дифференциального уравнения
|
(2.13) |
при нулевых входных воздействиях и единичных начальных условиях
![]() где
где
Она обладает следующими свойствами:
|
(2.14) |
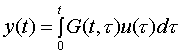
Зная переходную матрицу, можно определить реакцию системы
![]()
на произвольное входное воздействие при любых начальных условиях x(0) по выражению
|
(2.15) |
 .
.Здесь первое слагаемое - свободная составляющая движения, второе - вынужденная. Для выходных переменных имеем
|
(2.16) |

Если система имеет нулевые начальные условия x(0)=0, то
|
(2.17) |
 ,
,
|
(2.18) |
Матрица
![]() называется
матричной
импульсной функцией
потому что каждая компонента ее
представляет собой импульсную
функцию
называется
матричной
импульсной функцией
потому что каждая компонента ее
представляет собой импульсную
функцию
![]() ,
которая является реакцией
i-го выхода
на j-ое
импульсное входное воздействие при
нулевых остальных входных воздействиях
и начальных условиях.
,
которая является реакцией
i-го выхода
на j-ое
импульсное входное воздействие при
нулевых остальных входных воздействиях
и начальных условиях.
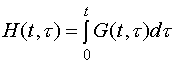
Для многоканальных систем может быть определена также матричная переходная характеристика в виде
|
(2.19) |
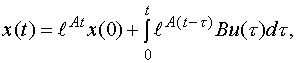
Для линейных систем с постоянными параметрами переходная матрица Ф(t) представляет собой матричную экспоненту
|
(2.20) |

где
![]()
С учетом (2.20) выражения (2.15) и (2.16) принимают вид
|
(2.21) |
|
(2.22) |

Матричная импульсная функция линейной системы с постоянными коэффициентами следующая:
|
(2.23) |
При небольших размерах или простой структуре матрицы A выражение (2.20) может быть использовано для точного представления переходной матрицы с помощью элементарных функций. В случае большой размерности матрицы A следует использовать существующие программы для вычисления матричного экспоненциала.
2.7. Передаточная функция
Наряду с обыкновенными дифференциальными уравнениями в теории автоматического управления используются различные их преобразования. Для линейных систем эти уравнения удобнее записывать в символической форме с использованием так называемого оператора дифференцирования
 ,
,
что позволяет преобразовывать дифференциальные уравнения как алгебраические и ввести новую динамическую характеристику - передаточную функцию.
Рассмотрим этот переход для многоканальных систем вида (2.6)
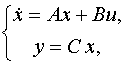
Запишем уравнение состояния в символической форме:
px = Ax + Bu ,
что позволяет определить вектор состояния
|
(2.24) |
и выходные переменные системы
|
(2.25) |
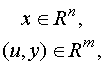
Матрица взаимосвязи между выходными переменными и управляющими воздействиями в выражении (2.25) при нулевых начальных условиях называется матричной передаточной функцией и обозначается
(2.26)
|
(2.26) |
Она представляет собой матрицу со следующими компонентами:
|
(2.27) |
где
![]() -
скалярные
передаточные функции,
которые представляют собой отношение
выходной величины к входной в символической
форме при нулевых начальных условиях
-
скалярные
передаточные функции,
которые представляют собой отношение
выходной величины к входной в символической
форме при нулевых начальных условиях
![]()
Собственными
передаточными функциями
i-го
канала называются компоненты передаточной
матрицы
![]() ,
которые находятся на главной диагонали.
Составляющие, расположенные выше или
ниже главной диагонали, называются
передаточными
функциями перекрестных связей
между каналами.
,
которые находятся на главной диагонали.
Составляющие, расположенные выше или
ниже главной диагонали, называются
передаточными
функциями перекрестных связей
между каналами.
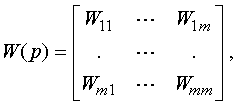
Обратная матрица
![]() находится
по выражению
находится
по выражению
|
(2.28) |
где
![]() -
присоединенная матрица. Как следует из
(2.28), все скалярные передаточные функции,
которые являются элементами передаточной
матрицы (2.27), содержат одинаковый
знаменатель -
det(pI-A).
Он называется характеристическим
полиномом
и имеет n-ый
порядок.
-
присоединенная матрица. Как следует из
(2.28), все скалярные передаточные функции,
которые являются элементами передаточной
матрицы (2.27), содержат одинаковый
знаменатель -
det(pI-A).
Он называется характеристическим
полиномом
и имеет n-ый
порядок.
Если теперь характеристический полином приравнять нулю, то получим характеристическое уравнение системы,
A(p) = det(pI-A) = 0. |
(2.29) |
Пример 2.6.
Определить передаточную матрицу для объекта
![]()
![]()
где ![]()
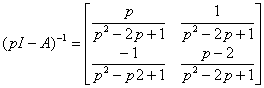
Воспользуемся выражением для передаточной матрицы (2.27) и найдем предварительно обратную матрицу (2.29). Здесь
![]()
Транспонированная матрица имеет вид
![]() a
det(pI-A) = p -2p+1, .
a
det(pI-A) = p -2p+1, .
где
![]() -
транспонированная матрица. В результате
получим следующую обратную матрицу:
-
транспонированная матрица. В результате
получим следующую обратную матрицу:
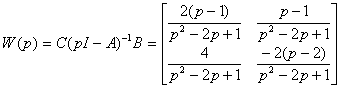
и передаточную матрицу объекта
Чаще всего передаточные функции применяются для описания одноканальных систем вида
|
(2.30) |
Используя оператор дифференцирования, запишем уравнение (2.30) в символической форме и найдем передаточную функцию как отношение выходной величины к входной:
|
(2.31) |
 ,
,
где
![]() -
характеристический полином.
-
характеристический полином.
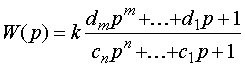
Передаточные функции принято записывать в стандартной форме:
|
(2.32) |
 ,
,
где
![]() -
коэффициент передачи;
-
коэффициент передачи;
![]()
![]()
Передаточную матрицу (передаточную функцию) можно также определить с помощью изображений Лапласа или Карсона-Хевисайда. Если подвергнуть одному из этих преобразований обе части дифференциального уравнения и найти соотношения между входными и выходными величинами при нулевых начальных условиях, то получим ту же самую передаточную матрицу (2.26) или функцию (2.31).
Для того, чтобы в дальнейшем различать преобразования дифференциальных уравнений, будем использовать следующие обозначения:
![]() -
оператор дифференцирования;
-
оператор дифференцирования;
![]() -
оператор преобразования Лапласа.
-
оператор преобразования Лапласа.
Получив одну из динамических характеристик объекта, можно определить все остальные. Переход от дифференциальных уравнений к передаточным функциям и обратно осуществляется с помощью оператора дифференцирования p.
Рассмотрим взаимосвязь между переходными характеристиками и передаточной функцией. Выходная переменная находится через импульсную функцию в соответствии с выражением (2.10),
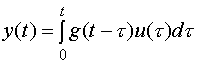
Подвергнем его преобразованию Лапласа,
 ,
,
и получим y(s) = g(s)u(s). Отсюда определим импульсную функцию:
|
(2.33) |
Таким образом, передаточная функция - есть преобразование по Лапласу от импульсной функции.
Пример 2.7.
Определить передаточную функцию объекта, дифференциальное уравнение которого имеет вид
![]()
Используя оператор дифференцирования d/dt = p, запишем уравнение объекта в символической форме
![]()
![]()
на основании которого определим искомую передаточную функцию объекта
![]()