

6.5.2. Постановка задачи синтеза для одноканального объекта
Рассматривается объект управления, передаточная функция которого имеет вид:
|
(6.47) |

где m
![]() n.
Влияние окружающей среды отражает
возмущение M(t).
n.
Влияние окружающей среды отражает
возмущение M(t).
Модальный метод синтеза предполагает формирование заданной реакции системы на отработку начальных условий, которая определяется корнями характеристического уравнения. Если они выбраны на основе требований, предъявляемых к динамике в виде условий (6.4) и (6.5), то соответствующее характеристическое уравнение называют желаемым.
Таким образом, задача синтеза заключается в обеспечении в замкнутой системе желаемого характеристического уравнения.
Для ее решения
предлагается использовать в качестве
регулятора последовательное звено
![]() и
звено с передаточной функцией
и
звено с передаточной функцией
![]() в
обратной
связи,
то есть структура системы задана и имеет
вид, приведенный на рис.6.14.
в
обратной
связи,
то есть структура системы задана и имеет
вид, приведенный на рис.6.14.
Звено прямого канала с передаточной функцией будем называть корректором статики, а звено с передаточной функцией - корректором динамики. При синтезе структура их известна, требуется определить параметры.
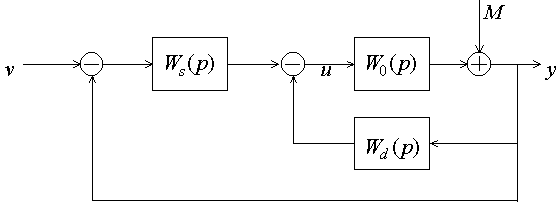
Рис.6.14. Расчетная структурная схема замкнутой системы
Рассмотрим последовательно этапы модального метода синтеза.
6.5.3. Обеспечение заданной статики
С целью выполнения
условия статики (6.4),
![]() ,
при произвольном возмущении
M
предлагается в качестве звена с
передаточной функцией
использовать
интегратор,
,
при произвольном возмущении
M
предлагается в качестве звена с
передаточной функцией
использовать
интегратор,
|
(6.48) |
 ,
,
то есть сделать
систему астатической.
Здесь
![]() -
неизвестный пока коэффициент передачи
регулятора.
-
неизвестный пока коэффициент передачи
регулятора.
Полагая, что объект и корректор динамики не содержат интегрирующих звеньев, запишем операторное выражение для выходной величины
|
(6.49) |
 .
.Отсюда в статике, при p =0,когда передаточные функции вырождаются в коэффициенты усиления, получим y (p)= v.
Как видим, с помощью
выбранного корректора статики
можно
обеспечить выполнение условия (6.4)
с ошибкой
![]() .
.
6.5.4. Расчет корректора динамики
Рассмотрим теперь характеристическое уравнение системы, приведенной на рис.6.14:
|
(6.50) |
В качестве корректора динамики предлагается выбирать следующую передаточную функцию:
|
(6.51) |
 ,
,
где B(p)
- полином числителя
,
а D(p)
- введенный расчетный полином с
неизвестными коэффициентами d
i
,
![]() .
.
С учетом (6.51) характеристическое уравнение (6.50) замкнутой системы принимает вид:
pA(p) + pD(p) + B(p) = 0, |
(6.52) |
причем его порядок равен (n+1).
Подставляя вместо A(p), D(p) и B(p) их значения, получим
![]() .
.
На основе требований
к качеству переходных процессов
(заданного перерегулирования
![]() и
быстродействия
)
сформируем желаемое характеристическое
уравнение того же порядка, что и (6.52):
и
быстродействия
)
сформируем желаемое характеристическое
уравнение того же порядка, что и (6.52):
|
(6.53) |
Для конструирования C(p) используем корневые оценки переходных процессов, с помощью которых получим эталонное распределение корней на комплексной плоскости.
Риc.6.15. Желаемое расположение корней |
Так расстояние, ближе которого не могут располагаться корни уравнения (6.53), зависит от и приближенно может быть найдено по соотношению:
Сектор, внутри которого находятся корни, определяется на основе зависящего от значения колебательности *. |

Вычисляется значение мнимой части корней с “максимальным” размахом:
|
(6.55) |
Эталонные корни
![]() выбираются
внутри ограниченной области (рис.6.15),затем
следующим образом формируется желаемое
уравнение (6.53):
выбираются
внутри ограниченной области (рис.6.15),затем
следующим образом формируется желаемое
уравнение (6.53):
|
(6.56) |
Приравнивая коэффициенты при соответствующих степенях желаемого (6.53) и действительного (6.52) характеристических уравнений, получим (n+1) расчетное соотношение для определения неизвестных коэффициентов регулятора,
|
(6.57) |
 .
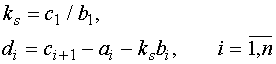
.Они легко вычисляются из (6.57) и имеют вид:
|
(6.58) |
Таким образом, мы определили параметры передаточных функций регулятора, обеспечивающего в системе требуемые свойства. Рассмотрим теперь возможности его реализации.