

3.10. Область применимости структурного метода
Структурный метод является удобным способом работы при расчете линейных автоматических систем, но имеет свои ограничения. Метод предполагает использование передаточных функций, поэтому может применяться только при нулевых начальных условиях.
Если в реальной системе начальные условия ненулевые, то при пользовании структурным методом необходимо придерживаться следующего правила: при любом преобразовании системы ее порядок не должен уменьшаться, то есть недопустимо сокращение одинаковых множителей в числителе и знаменателе передаточной функции.
Сокращая одинаковые множители, мы тем самым выбрасываем из системы реально существующие звенья. Проиллюстрируем это утверждение примером.
Пример 3.1.
Рассмотрим систему, состоящую из двух последовательно соединенных звеньев: интегрирующего и дифференцирующего.
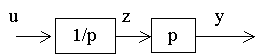
Рис.3.37. Структурная схема системы
Используя структурные преобразования, найдем передаточную функцию системы:
W(p)=(1/p) · p = 1 .
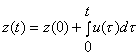
Отсюда следует вывод, что пара рассматриваемых звеньев является безынерционным звеном, то есть сигнал на выходе повторяет сигнал на входе. Докажем это, рассматривая промежуточный сигнал
 ,
,
где z(0) - начальные условия. Получим сигнал на выходе
y(t) =
![]() (t)
= u(t)
(t)
= u(t)
Поменяем звенья местами и рассмотрим систему
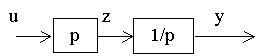
Передаточная функция ее та же:
W(p) = p * 1/p =1 .
Очевидно, что в этой системе выход не повторяет вход. Покажем это, рассматривая промежуточный сигнал
![]() .
.
Выходной сигнал определяется соотношением:
![]()
Как видим, сигнал на выходе второй системы отличается от сигнала на выходе первой на величину начальных условий, хотя обе имеют одну передаточную функцию.
4. Устойчивость линейных непрерывных систем
4.1. Основные понятия и определения
4.2. Условие устойчивости линейных систем
4.3. Критерии устойчивости
4.3.1. Критерий устойчивости Гурвица
4.3.2. Критерий устойчивости Михайлова
4.3.3. Критерий устойчивости Найквиста
4.3.4. Логарифмическая форма критерия Найквиста
4.4. Области и запасы устойчивости
4.4.1. Основные понятия и определения
4.4.2. Частотные оценки запаса
4.4.3. Корневые оценки
4.4.4. Метод D-разбиения
4.1. Основные понятия и определения
Устойчивость - это основное качественное свойство системы автоматического управления, без которого она неработоспособна.
Устойчивость - свойство системы, характеризующее способность возвращаться в равновесное состояние после снятия внешних сил, которые вывели её из этого состояния.
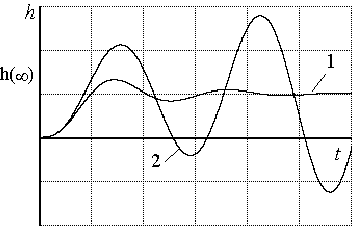
На рис.4.1. приведены переходные характеристики неустойчивой и устойчивой системы. Для последней справедливо условие
Рис.4.1. Переходные характеристики системы |
1 - сходящийся процесс, система устойчива. 2 - расходящийся процесс, система неустойчива. |
Об устойчивости можно судить также по импульсным функциям (рис.4.2), которые для устойчивой системы удовлетворяют условию
|
В случае линейных САУ устойчивость определяется только ее структурой и параметрами и не зависит от внешних воздействий. Рассмотрим, как оценить это свойство для систем типа: |
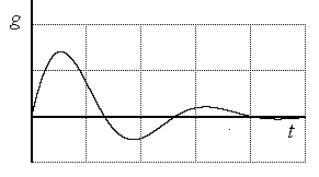 Рис.4.2.Импульсная
функция
Рис.4.2.Импульсная
функция
|
(4.1) |
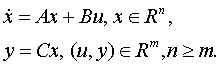
Переходные процессы в ней определяются как решение матричного уравнения состояния следующим образом:
|
(4.2) |
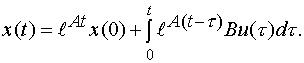
Здесь первое слагаемое соответствует свободной составляющей движения, второе - вынужденной.
Основным режимом работы системы является равновесный (статический) режим, при котором переменные состояния с течением времени не меняются, а все производные координат состояния равны нулю.
Покажем, что процесс
движения к равновесию можно считать
свободным. Предварительно запишем
уравнение равновесия, полагая в (4.1)
![]()
|
(4.3) |
откуда при det A
![]() 0
определим равновесное значение переменных
состояния
0
определим равновесное значение переменных
состояния
|
(4.4) |
Введем новые координаты, равные отклонениям от точки равновесия,
|
(4.5) |
и запишем уравнение в отклонениях:
|
(4.6) |
После подстановки в (4.6) вместо его значения из (4.1) с учетом (4.5) получим
![]()
Уравнение в отклонениях имеет вид:
|
(4.7) |
Определение. Линейная система называется устойчивой, если выполняется свойство:
|
(4.8) |
Вид процессов системы (4.7) определяется ее решением, которое находится через матричную экспоненту в виде
|
(4.9) |
Поскольку выражение (4.9) соответствует первой составляющей решения (4.2), то устойчивость линейной системы (4.1) определяется только свойствами автономной системы и не зависит от внешних воздействий. Это означает, что можно не переходить к уравнениям в отклонениях от состояния равновесия, а для анализа устойчивости исследовать свойства матрицы A.