

4.5.2.1. Початковий механізм
Визначаємо швидкість т. А1 кривошипа, м/с:
|
(4.17) |
де w1 – кутова швидкість кривошипа, с-1;
|
(4.18) |
де n1 – частота обертання кривошипа, хв -1 (за завданням).
Приймаємо масштаб плану швидкостей, мс-1/мм:
|
(4.19) |
де
![]() - відрізок на плані, що зображує швидкість
т. А1,
мм.
- відрізок на плані, що зображує швидкість
т. А1,
мм.
Приймаємо
від 50 до 80 мм, але таким чином, щоб масштаб
![]() був
зручним для користування, наприклад,
0,01 мс-1/мм
або 0,005 мс-1/мм
(для цього між значеннями
був
зручним для користування, наприклад,
0,01 мс-1/мм
або 0,005 мс-1/мм
(для цього між значеннями
![]() і
має бути кратність 1, 2, 2.5, 4, 5....як у
кресленні).
і
має бути кратність 1, 2, 2.5, 4, 5....як у
кресленні).
Вектор
![]() перпендикулярний до кривошипа О1А
у бік w1.
перпендикулярний до кривошипа О1А
у бік w1.
Із довільного полюса р проводимо відрізок перпендикулярно до О1А у бік w1.
а. |
|||||||||||||||||
I5
II5
III5
IY5
Y5
YI5
YII5
0,1
1,2
2,3
3,4
3,0
4,5
5,0 |
в. |
||||||||||||||||
|
|||||||||||||||||
г. |
д. |
е. |
|||||||||||||||


ж. |
з. |
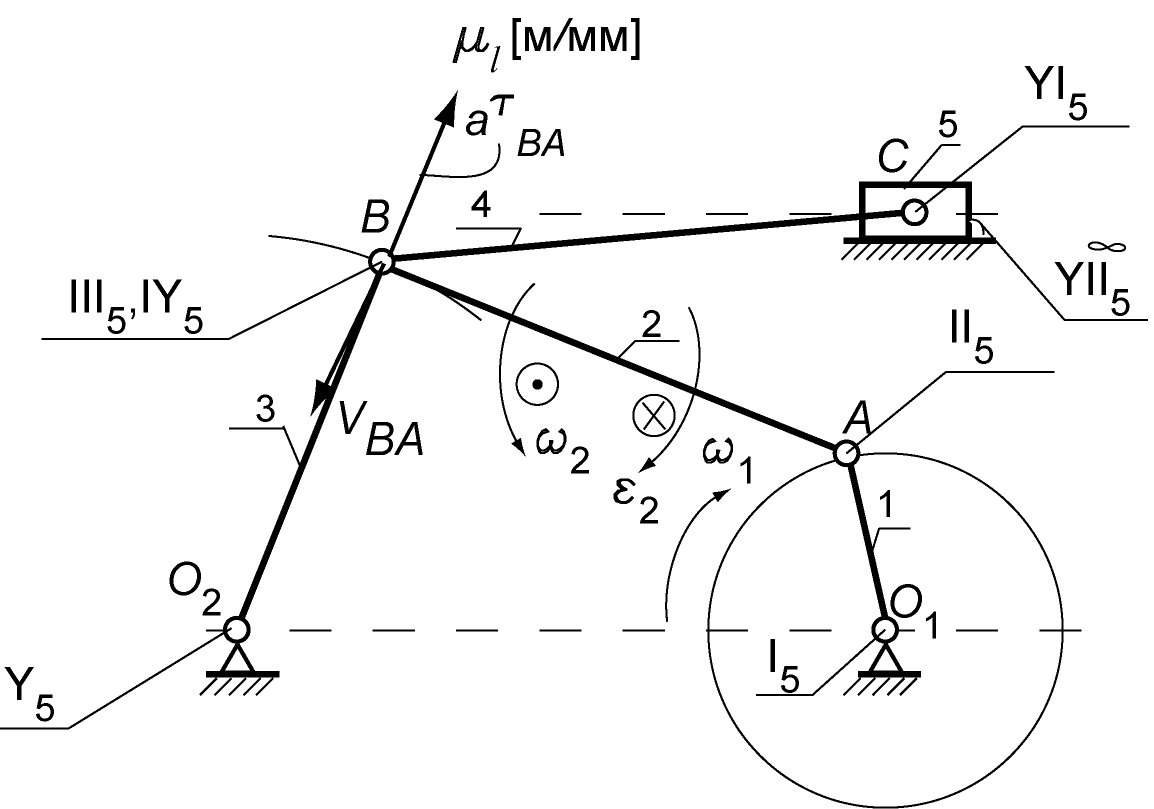
Рис. 4.4: а. – КСМ; б. – таблиця ланок і КП; в. – структурна схема ШВМ; г. – початковий механізм; д,е – групи Ассура; ж.- план швидкостей; з.- план прискорень
|


4.5.2.2. Група 2-3
Швидкість
 ,
тому що ланки 1 і 2 зв’язані обертальною
,
тому що ланки 1 і 2 зв’язані обертальною
парою. Біля т. а1 ставимо т. а2.
Ланки
2 і 3 також в’язані обертальною парою,
тому
![]() .
.
Для визначення швидкості т. В складаємо два векторних рівняння,
тому що т. В належить двом ланкам:
|
(4.20) |
де
швидкість
![]() перпендикулярна
до ланки ВА;
перпендикулярна
до ланки ВА;
![]() =
0, т. щ. це стояк;
=
0, т. щ. це стояк;
![]() перпендикулярна до ланки.ВО2.
перпендикулярна до ланки.ВО2.
Із т. а2 проводимо пряму, перпендикулярну до ланки ВА, а з полюса р - пряму, перпендикулярну до ланки ВО2.
На перетині отримуємо т. b2,3. Тоді швидкість т. В:
![]() .
.
4.5.2.3. Група 4-5
1. Швидкість
![]() =
=
![]() ,
тому що ланки 3 і 4 зв'язані обертальною
парою. Біля т.
,
тому що ланки 3 і 4 зв'язані обертальною
парою. Біля т.
![]() ставимо т.
ставимо т.
![]() .
.
Ланки 4 і
5 також зв'язані обертальною парою, тому
![]() .
.
2. Для визначення швидкості т. С складаємо два векторних рівняння, тому що т. С належить двом ланкам:
|
(4.21) |
де
швидкість
![]() перпендикулярна до ланки CB,
перпендикулярна до ланки CB,
![]() =
0, т. щ. це стояк;
=
0, т. щ. це стояк;
![]() паралельна вісі руху повзуна С.
паралельна вісі руху повзуна С.
Через точку проводимо пряму, перпендикулярну до ланки СВ, а через полюс р - горизонтальну пряму, паралельну вісі руху повзуна С.
3. На
перетині отримуємо т.
![]() .
Тоді швидкість т. С:
.
Тоді швидкість т. С:
![]() .
.