

31. Техника решения логических уравнений с помощью булевых матриц.
Для решения логического уравнения нужно:
1)Транспонированную матрицу, состоящую из изображающих чисел коэффициентов одной части уравнения, умножить на матрицу, состоящую из изображающих чисел неизвестных этой же части уравнения. 2)Тоже самое проделать с другой частью уравнения.3)Полученные матрицы построчно сравниваем между собой, и если элементы в столбцах совпадают, то вносим в таблицу результатов соответствующие значения неизвестных, по отношению к базису коэффициентов.
32. Две задачи о замене переменных в булевых функциях.
Первая задача, Предположим, что задана некоторая функция F1 (А, В, С, ...) и совершается преобразование вида: A, B, C, … - элементарные высказывания заменяются на A = A (A, B, C, …),
B = B (A, B, C, …), C = C (A, B, C, …), …, (*) где A, B, C, … - новые переменные. Требуется найти функцию G1 (A, B, C, …) = F1 [A (A, B, C, … ),
B ( A, B, C, …), …].
Вторая задача обратна первой. Найти такое преобразование переменных вида (*), которое переводило бы функции Fk в функции Gk, то есть при всех k = 1, 2, … Fk [A (A, B, C, …); B (A, B, C, …); C (A, B, C, …); …] = Gk (A, B, C, …).
33. Прямая и обратная логические задачи распознавания.
Имеется априорная информация:
о взаимосвязях между признаками А1,…Аn
о взаимосвязях между индикаторами классов m.
о взаимосвязях между объектами и классами или между признаками и индикаторами.
Эта информация задана в виде логических уравнений
Фi(А1,…Аn)=1![]()
![]()
![]()
Прямая задача распознавания:
Требуется найти неизвестную функцию F(1,…,m):
неG(A1,…,An)+F(1,…,m)=1, где G(A1,…,An) – апостериорная информация
Обратная задача распознавания:
требуется определить множество априорных неизвестных посылок G(A1,…,An), из которых следуют некоторые данные вывода F(1,…,m), при условии, что признаки А1,…Аn и классы m. Связаны зависимостями (*), (**) и (***)
34. Пример логической задачи распознавания
Пусть объект характ-ся единственным бинарным признаком A1 (n=1).
m=2 : w1,w2=>Ω1, 2. Априорная информация (система (*)) :
- классы не могут иметь место одновременно: Ω1=не 2.
- значение признака однозначно определяет класс : A1= Ω1. Пусть об объекте известно: A1=0 не А1=1(**), G≡не А1. Тогда система (***) имеет вид :
(не не А1UF(Ω1, 2))=1& Ω1≡не 2& А1= Ω1. => F(Ω1, 2)=не А1(из1),
F(Ω1, 2)=не Ω1 (из 3)=> F(Ω1, 2)= 2.
37. Перцептрон и его мат. Модель
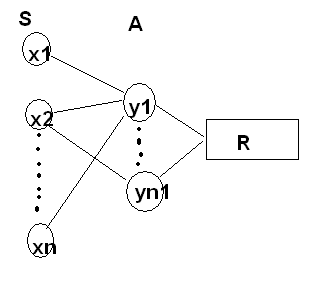
Перцептрон-устройство,моделирующее работу человеческого мозга. Состоит из : а) S1,…, Sn – рецепторы (воспринимают сигналы из окруж-й среды).
б) A1,…,
An
– А-элементы
(каждый из них соединён с группой
s-элементов,
воспринимая их сигналы, выраб-т вых-й
сигнал, если общее воздействие s-э
превосходит нек-й заданный порог). в)
R-э
(воспринимает сигнал от А-э, выраб-т
вых-й сигнал, кот-й явл-ся линейной
комбинацией а-э).
![]()
Обучение перц-на свод-ся к установлению таких
значений wi, при кот-х маркир-я ОП правильно классиф-ся перц-м. Замечание:
различ-е модели перц-в отлич-ся друг от друга:
1)восприним-й способн-ю S-э.2)св-ми А-э. 3)системами соедин-я элементов. 4)кол-м слоёв элем-в. 5)проц-ми обучения перцепторна.
Матмодель перц-на: S-э поставим в соответ-е вектор x=(x1,…,xn); А-э –вектор y=(y1,…,yn1). y=(y1,…,yn1)T=φ(x)=(φ1(x),…,φn1(x))T.
Решение об отнесении х к одному из классов принимается так: 1) если ∑i=1n1 wiyi(в матр виде wTy)>0∑i=1n1 wi φi(x)>0=>x принадл-т w1. 2)если <0<0=>х прин-т w2. Геометричес-я интерпрет-я: если x€Xn, то wTφ(x)=0-определяет разделяющую гиперповерхность в пространстве Х. Если Х лежит по одну сторону раздел-й гиперпов-ти, то х€w1, и наоборот. x€Xn1 y€Yn1 , то wTy=0-ур-е плоскости, проход-й ч/з начало координат. Тогда решение: 2 полупрост-ва (для w1 и w2), простр-во Yn1 –спрямляющее пространство.