

1.Сущность, принципы САУ и САР. Общей наукой об управлении является кибернетика. Предметом технической кибернетики является определение принципов управления, сбор и анализ информации о свойствах систем, а также условиях их использования, синтез алгоритмов управления и создание управляющих устройств, реализующих требуемые алгоритмы. Осуществление процессов управления без непосредственного участия человека составляет задачу автоматического управления. Эта задача решается методами и средствами, которые изучаются и разрабатываются в прикладной дисциплине — автоматике. Роль автоматики непрерывно растет во всех отраслях в энергетике, на транспорте, в сельском хозяйстве и др.), что объясняется рядом причин: 1) с развитием и совершенствованием методов управления различными процессами требуются скорости и усилия, значительно превышающие физические возможности человека; 2) при автоматическом управлении процессами значительно повышаются технико-экономические показатели производства из-за сокращения эксплуатационных расходов и повышения надежности протекания процессов по требуемым программам; 3) появление и развитие отраслей, в которых управление процессами становится недоступным для человека или вредным для его организма. При автоматическом управлении решается комплекс задач, в решении кторых важную роль играет автоматическое регулирование, которое заключается в обеспечении без вмешательства человека заданных значений одной или нескольких величин, определяющих режим работы машины, аппарата, станка, технической системы. Однако при полуавтоматическом управлении какими-либо процессами автоматическое регулирование может иметь и самостоятельное значение. Изучение принципов автоматического регулирования различных процессов, определение методов построения, исследования и расчета технических средств, обеспечивающих автоматическое регулирование процессов, является предметом (ТАР). (ТАУ) – наука изучающая процессы управления и проектирования систем АУ наука изучающая системы работающие по замкнутому циклу. Система управления – соединения отдельных элементов в определенные конфигурации ,позволяющие обеспечение заданных характеристик. Любой процесс может быть представлен в виде блока ВХОДНОЙ сигнал ОБЪЕКТ ВЫХОДНОЙ сигнал. Для получения желаемой реакции обычно используют регулятор или исполнительные устройства. Управление – совокупность действий направленных на достижение поставленной цели. Регулирование – часть управления направленное на достижение объектом заданного состояния. Объект управления – устройство реализующее процессы связанные с движением масс, энергии, информации. СУ характеризуется значением всех параметров и показателей в данный момент времени. САУ – совместное действие УУ и ОУ , изменение параметров ОУ происходит под влиянием воздействий: задающее, управляющее, возмущающее. (см. также 5 билет)
3. Энергетические установки как объекты автоматического регулирования.
5. Законы регулирования. Техническая система, в которой необходимо поддерживать либо изменять по заданному закону значения одной или нескольких регулируемых величин, называется регулируемым объектом. Комплекс устройств, посредством которых осуществляется автоматическое регулирование процессов, называется автоматическим регулятором или, , регулятором.
Р егулируемый
объект и регулятор образуют систему
автоматического регулирования (САР).
Для обеспечения единообразия в
определении взаимной связи отдельных
элементов в различных по принципу
действия и конструктивному исполнению
системах автоматического регулирования
применяют функциональные схемы
(блок-схемы). В таких схемах элементы
системы изображаются в виде прямоугольников
с записью в поле прямоугольника
обозначения, сокращенно указывающего
назначение элемента. Связи между
элементами показываются стрелками.
Если не рассматривать составные части
регулятора и регулируемого объекта, то
получается укрупненная функциональная
схема (рис.). Она является достаточно
общей для целого ряда систем автоматического
регулирования, в которых обеспечивается
заданное значение одной регулируемой
величины х (t). Эта величина сравнивается
с заданным значением g (t) и выявляется
ошибка (рассогласование)
егулируемый
объект и регулятор образуют систему
автоматического регулирования (САР).
Для обеспечения единообразия в
определении взаимной связи отдельных
элементов в различных по принципу
действия и конструктивному исполнению
системах автоматического регулирования
применяют функциональные схемы
(блок-схемы). В таких схемах элементы
системы изображаются в виде прямоугольников
с записью в поле прямоугольника
обозначения, сокращенно указывающего
назначение элемента. Связи между
элементами показываются стрелками.
Если не рассматривать составные части
регулятора и регулируемого объекта, то
получается укрупненная функциональная
схема (рис.). Она является достаточно
общей для целого ряда систем автоматического
регулирования, в которых обеспечивается
заданное значение одной регулируемой
величины х (t). Эта величина сравнивается
с заданным значением g (t) и выявляется
ошибка (рассогласование)
![]() В
соответствии с выявленной ошибкой
регулятор Р оказывает регулирующее
воздействие г (t) на регулируемый объект
РО, направленное на уменьшение ошибки-
до допустимых значений. Ошибки в системах
автоматического регулирования возникают
вследствие возмущающих воздействий
(возмущений) / (/) на регулируемый объект
или из-за изменения задающего воздействия
g (t). Приведенная на рис. функциональная
схема показывает, что в системе-автоматического
регулирования происходит передача
сигналов по замкнутому контуру. При
этом реализуется основной принцип
построения замкнутых систем автоматического
регулирования, заключающийся в применении
обратной связи, по которой информация
об изменении регулируемой величины от
регулируемого объекта передается
регулятору. Эта обратная связь является
отрицательной. В более общем случае
регулирующее воздействие формируется
в зависимости от изменения регулируемой
величины, от возмущающего и задающего
воздействий. Зависимость, определяющая
желаемое регулирующее воздействие,
называется законом (алгоритмом)
регулирования. В качестве переменных
в закон регулирования могут входить
регулируемая величина х и задающее
воздействие g, возмущающее воздействие
/, а также производные и интегралы по
времени от этих величин. Достаточно
широко применяются САР, в которых закон
регулирования является функцией только
ошибки по регулируемой величине. В таких
системах реализуется принцип регулирования
по отклонению регулируемой величины.
Следует заметить, что отклонение
регулируемой величины и ошибка могут
иметь разные значения. Однако, если в
САР должно поддерживаться постоянное
значение регулируемой величины,
принимаемое за начало отсчета при ее
измерении, то значение ошибки и отклонения
будут совпадать. Регулирование по
возмущению позволяет существенно
снизить, а иногда и предотвратить
изменение регулируемой величины, если
регулятор, получив информацию о
действующем на объект возмущении, может
создать необходимое регулирующее
воздействие. Однако принцип регулирования
по возмущению имеет и недостатки,
связанные с тем, что регулирующие
воздействия формируются только по
отдельным видам возмущений, поэтому
при
В
соответствии с выявленной ошибкой
регулятор Р оказывает регулирующее
воздействие г (t) на регулируемый объект
РО, направленное на уменьшение ошибки-
до допустимых значений. Ошибки в системах
автоматического регулирования возникают
вследствие возмущающих воздействий
(возмущений) / (/) на регулируемый объект
или из-за изменения задающего воздействия
g (t). Приведенная на рис. функциональная
схема показывает, что в системе-автоматического
регулирования происходит передача
сигналов по замкнутому контуру. При
этом реализуется основной принцип
построения замкнутых систем автоматического
регулирования, заключающийся в применении
обратной связи, по которой информация
об изменении регулируемой величины от
регулируемого объекта передается
регулятору. Эта обратная связь является
отрицательной. В более общем случае
регулирующее воздействие формируется
в зависимости от изменения регулируемой
величины, от возмущающего и задающего
воздействий. Зависимость, определяющая
желаемое регулирующее воздействие,
называется законом (алгоритмом)
регулирования. В качестве переменных
в закон регулирования могут входить
регулируемая величина х и задающее
воздействие g, возмущающее воздействие
/, а также производные и интегралы по
времени от этих величин. Достаточно
широко применяются САР, в которых закон
регулирования является функцией только
ошибки по регулируемой величине. В таких
системах реализуется принцип регулирования
по отклонению регулируемой величины.
Следует заметить, что отклонение
регулируемой величины и ошибка могут
иметь разные значения. Однако, если в
САР должно поддерживаться постоянное
значение регулируемой величины,
принимаемое за начало отсчета при ее
измерении, то значение ошибки и отклонения
будут совпадать. Регулирование по
возмущению позволяет существенно
снизить, а иногда и предотвратить
изменение регулируемой величины, если
регулятор, получив информацию о
действующем на объект возмущении, может
создать необходимое регулирующее
воздействие. Однако принцип регулирования
по возмущению имеет и недостатки,
связанные с тем, что регулирующие
воздействия формируются только по
отдельным видам возмущений, поэтому
при
возникновении каких-либо других возмущений объект не управляется
регулятором. Кроме того, возникают трудности в измерении возмущающих воздействий и в определении закона (алгоритма) регулирования. Из-за этих недостатков более целесообразными являются САР, в которых принцип
регулирования по возмущению используется в комбинации с другими
принципами, например, регулирования по отклонению. В связи с более широким кругом решаемых задач (САУ) получаются обычно более развитыми и сложными, чем (САР). В САУ может предусматриваться адаптация или самонастройка по внешним воздействиям, а также осуществляется автоматический выбор оптимальных режимов. САУ разделяются на две основные части: управляемый объект и управляющую систему. При этом управляемым объектом может быть как машина, аппарат,
станок, так и другая система управления. Применяются разомкнутые и замкнутые САУ. В разомкнутых системах управляющее воздействие не сравнивается с текущим значением регулируемой или управляемой величины, определяющей состояние управляемого объекта. Закон управляющего воздействия .выбирается здесь исходя из цели управления,
свойств управляемого объекта и предполагаемого характера возмущающих воздействий. В замкнутых САУ так же, как и в САР, управляющее воздействие на управляемый объект формируется в результате сравнения текущего значения управляемой величины с заданным. Излагаемые ниже
вопросы будут освещаться в основном в приложении к САР и к замкнутым САУ.
7. Пропорциональные, интегральные и комбинированные сар.
9. Усилительные звенья. Характеристики. Пропорциональное звено передает сигналы от входа к выходу без сдвига по фазе, причем отношение амплитуд выходной и входной величин сохраняется постоянным при всех частотах. Примерами пропорциональных звеньев могут служить рычажные
механизмы, дифференциальные зубчатые механизмы, электрические потенциометры, а в ряде случаев сельсины и вращающиеся трансформаторы. Зависимость выходной величины от входной в пропорциональном звене имеет вид Хвых = КхвХ. У механизмов коэффициент передачи совпадает с передаточным числом, а у электрических устройств определяется значением выходного напряжения, приходящимся на единицу перемещения щетки потенциометра, угла поворота ротора сельсина или вращающегося трансформатора.
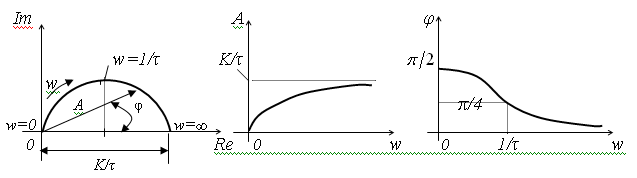
11. Колебательные
звенья. Характеристики. Колебательное
звено описывается уравнением—![]() Это уравнение приводится к виду
Это уравнение приводится к виду
![]() если принять Т2 = Т и использовать
соотношение
если принять Т2 = Т и использовать
соотношение
![]() Величина
Величина
![]() называется коэффициентом относительного
демпфирования и для колебательного
звена может находиться в пределах
называется коэффициентом относительного
демпфирования и для колебательного
звена может находиться в пределах
![]() Если
Если
![]() = 0, то колебательное звено вырождается
в консервативное, которое описывается
уравнением
= 0, то колебательное звено вырождается
в консервативное, которое описывается
уравнением
![]() При
При
![]() >=1
колебательное звено переходит в
апериодическое звено второго порядка.
Передаточная функция колебательного
звена по уравнению имеет вид
>=1
колебательное звено переходит в
апериодическое звено второго порядка.
Передаточная функция колебательного
звена по уравнению имеет вид
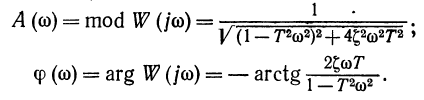
 из
передаточной функции получается
амплитудно-фазовая частотная характеристика
которая для колебательного звена и
апериодического звена второго порядка
отличается численным значением
из
передаточной функции получается
амплитудно-фазовая частотная характеристика
которая для колебательного звена и
апериодического звена второго порядка
отличается численным значением
![]()
![]() Амплитудная
и фазовая частотные характеристики
находятся из зависимости
Амплитудная
и фазовая частотные характеристики
находятся из зависимости
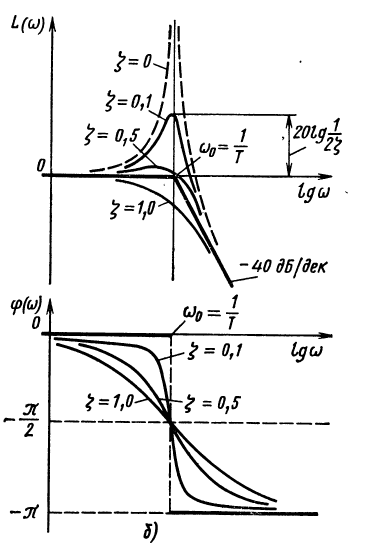
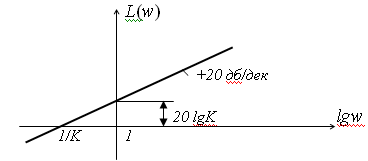
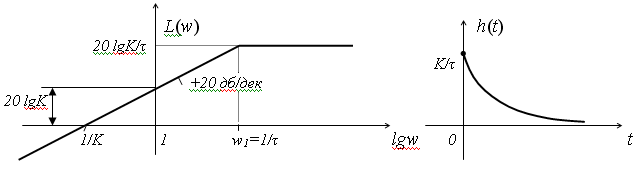
 Логарифмическая
амплитудная характеристика имеет вид
Логарифмическая
амплитудная характеристика имеет вид![]()
13. Дифференцирующие и форсирующие звенья. Характеристики.
Идеальное дифференцирующее звено.
|
Передаточная функция данного звена |
|
|
АФХ, АЧХ и ФЧХ имеют вид |
|
|
|
|
|
ЛАХ звена равна |
|
|
|
|
|
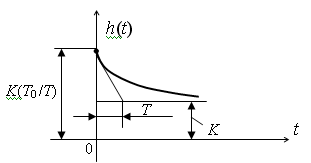
Переходная функция звена |
|
|
Реальное дифференцирующее звено.
|
||||||||||
Форсирующее
|
Передаточная функция звена |
|
|
В установившемся режиме выходная величина данного звена пропорциональна входной, т.е. оно может быть отнесено к звеньям позиционного типа. При η >> 1 оно по своим свойствам приближается к форсирующему звену |
|
|
АФХ инерционно-форсирующего звена
|
|
|
|
|
15. Структурные
схемы.
Графическое представление САР различными
звеньями с указанием связи между ними.
Динамическое звено – элемент преобразующий
математ. Описание в виде передаточной
функции. Сумматор – элемент осуществляющий
алгебраическое сложение сигналов. Узел
элемент разветвляющий входной сигнал
на идентичный сигнал. При заданной
структурной схеме, исходных вход/выход
сигналов необходимо определить
передаточную функцию. Для определения
передаточной функции пользуются методом
обратного движения, также упрощением
схемы. Составляется операторное уравнение
содержащее передаточные функции
регулируемых и регулирующих величин.
Последовательным называется соединение
звеньев, при котором выходная величина
(сигнал) предыдущего звена служит
входной величиной (сигналом) для
последующего звена.
 Параллельным называется соединение
звеньев, при котором входная величина
(входной сигнал) имеет одинаковые
значения для всех звеньев, а выходная
величина (выходной сигнал) является
суммой выходных величин этих звеньев.
Параллельным называется соединение
звеньев, при котором входная величина
(входной сигнал) имеет одинаковые
значения для всех звеньев, а выходная
величина (выходной сигнал) является
суммой выходных величин этих звеньев.
17. Характеристический
полином и характеристическое уравнение.
Характеристический
полином описывает изменение управляющей
величины, характеризует процесс
происходящий в системе под влиянием
управляющего воздействия. Уравнение
характеризующее данный полином -
характеристическое
уравнение,
позволяющее найти корни и получить
полное решение дифференциального ур-я
. ХП и ХУ служат основой для исследования
системы на устойчивость. Пусть
исходя из предположений, сделанных
относительно свойств и характеристик
какого-либо элемента или САР, или в
результате применения рассмотренных
выше методов линеаризации, получено
следующее линейное дифференциальное
уравнение с постоянными коэффициентами: Проведем
преобразование уравнения по Лапласу,
п
постоянными коэффициентами: Проведем
преобразование уравнения по Лапласу,
п олагая
начальные условия нулевыми. В результате
найдем уравнение в изображениях
Отношение изображения
выходной величины к изображению входной
величины, полученное при нулевых
начальных условиях, называется
передаточной функцией. Обозначив
передаточную функцию
олагая
начальные условия нулевыми. В результате
найдем уравнение в изображениях
Отношение изображения
выходной величины к изображению входной
величины, полученное при нулевых
начальных условиях, называется
передаточной функцией. Обозначив
передаточную функцию
![]()
 выражение в правой
части которого совпадает с выражением,
определяющим передаточную функцию при
замене символа дифференцирования на
переменную s. передаточную
выражение в правой
части которого совпадает с выражением,
определяющим передаточную функцию при
замене символа дифференцирования на
переменную s. передаточную
ф
![]() ункцию
можно формально находить, беря отношение
операторного полинома В
этом случае передаточная функция
определяет связь между выходной и
входной величинами в пространстве
оригиналов. Операторный полином
получается из правой части дифференциального
уравнения связанной с входной величиной,
и
ункцию
можно формально находить, беря отношение
операторного полинома В
этом случае передаточная функция
определяет связь между выходной и
входной величинами в пространстве
оригиналов. Операторный полином
получается из правой части дифференциального
уравнения связанной с входной величиной,
и
поэтому может быть
назван входным оператором или оператором
воздействия. Операторный полином
определяет левую часть дифференциального
уравнения, характеризующую собственные
свойства элемента или системы
автоматического регулирования, которые
не зависят от внешних воздействий. В
связи с этим такой полином называется
собственным или выходным оператором.
Характеристическое уравнение,
соответствующее дифференциальному
уравнению
![]()
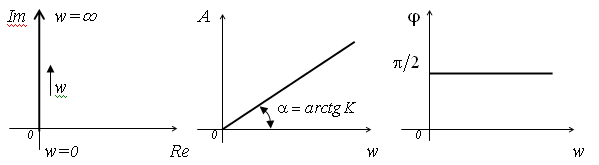
19. частотные характеристики интегрирующих систем.
Идеальное интегрирующее звено.
|
Данное звено имеет передаточную функцию |
|
|
АФХ, АЧХ и ФЧХ имеют вид: |
|
|
|
|
|
ЛАХ
данного звена равна |
|
21. частотные характеристики изодромных систем.
Изодромное звено (пропорционально-интегрирующее звено).
Это звено имеет
передаточную функцию
![]() т.е. его можно представить как паралл.
соед. интегр. и пропорционального
(безынерционного) звенья. После простых
преобр. это звено можно также записать
в виде:
т.е. его можно представить как паралл.
соед. интегр. и пропорционального
(безынерционного) звенья. После простых
преобр. это звено можно также записать
в виде:
![]() где
(1+τs) – форсир. звено, τ =K2/K1.
где
(1+τs) – форсир. звено, τ =K2/K1.
Таким образом, изодромное звено может быть также представлено как последовательное соединение интегрирующего и форсирующего звеньев.