

23. Типовые временные характеристики.
|
Под динамическим звеном понимают в общем случае абстрактное устройство, имеющее вход и выход, и для которого задано уравнение, связывающее сигналы на входе и выходе, как это показано на рис. |
|

Временные
характеристики определяют вид изменения
выходного сигнала при подаче на вход
звена типового управляющего воздействия.
Это позволяет сравнивать свойства
звеньев в динамических режимах работы.
Временные свойства звена определяются
его переходной и импульсной переходной
характеристиками. Переходная функция
или переходная характеристика h(t)
представляет собой переходный процесс
на выходе звена, возникающий при подаче
на его вход скачкообразного воздействия
при величине скачка, равного единице.
Такое воздействие называется единичной
ступенчатой функцией и обозначается
X(t)=1(t),
что соответствует следующим условиям(0):
Изображение единичной ступенчатой
функции определяется как
![]()

![]() (0)
(0)
Чтобы
определить изображение переходной
функции при известной передаточной
функции звена W(s)
необходимо выполнить следующую операцию:
![]() Уравнение линейного динамического
звена имеет следующий общий вид(1):
Уравнение линейного динамического
звена имеет следующий общий вид(1):
 где
где
![]() - постоянные коэффициенты,
- постоянные коэффициенты,
![]() .
.
![]()
 Подвергнем уравнение
(1) преобразованию Лапласа, считая
начальные условия нулевыми и заменяя
оригиналы сигналов их изображениями
по Лапласу
Подвергнем уравнение
(1) преобразованию Лапласа, считая
начальные условия нулевыми и заменяя
оригиналы сигналов их изображениями
по Лапласу
![]() ,
,![]() .
.
Используя теоремы
преобразования Лапласа линейности и
дифференцирования, получим операторное
уравнение, связывающие изображения
входного и выходного сигналов(2) Получим
из (2) отношение изображений выходного
и входного сигналов (3). Отношение
изображений выходного и входного
сигналов называют передаточной функцией
дин. звена![]()
Функция веса или
импульсная переходная характеристика
представляет собой реакцию звена на
единичную импульсную функцию. Единичная
импульсная функция, или δ– функция,
представляет собой производную от
единичной ступенчатой функции. То есть![]()
Дельта-функция
тождественно равна нулю во всех точках,
кроме t=0, где она стремится к бесконечности.
Нетрудно установить, что изображение
дельта-функции определяется как
Изображение функции
веса определяется как:
![]()
25. Понятие устойчивости линеаризованных систем.
|
Уст-сть лин. системы – св-во затухания лин. процесса с течением вр-ни, т.е (1): |
|
(1) |
|
|
(2) |
|
Хар-р свободного движения САУ определяется корнями его хар-го уравнения: |
|
||
|
Вещественные корни |
Комплексные корни |
Мнимые корни |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для затухания переходного процесса необходимо, чтобы вещ. части корней были <0, если хотяб один корень будет >0, то система будет неустойчивой.Система на границе устойчивости, если есть нулевой корень (апериодическая граница); пара чисто мнимых корней (колебат. граница уст-ти); бесконечный корень (исчезновение порядков) |
|||



|
Необходимый критерий устойчивости: |
|
Необходимым(но недостаточным) условием устойчивости системы является положительность коэффициентов ее характеристического уравнения. Окончательный вывод об устойчивости системы можно сделать применив критерий Гурвица. Для систем первого и второго порядков необходимое условие является и достаточным. |
27. Частотный
критерий Найквиста. Для
определения устойчивости по методу
Найквиста следует построить логарифмические
амплитудно-фазовые частотные характеристики
и годограф передаточной функции
разомкнутой системы. Передаточная
функция САР
![]() .
.
Амплитуда
передаточной функции:![]() ,
где Vm
и Um
реальная и мнимая части
,
где Vm
и Um
реальная и мнимая части
Р
 ис.4.
Амплитудно – частотная характеристика.
Фаза передаточной функции:
ис.4.
Амплитудно – частотная характеристика.
Фаза передаточной функции:
![]()
.
Рис.5. Фазовая частотная характеристика.
Л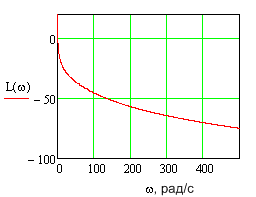 огарифмическая
амплитудно-фазовая частотная
характеристика:
огарифмическая
амплитудно-фазовая частотная
характеристика:
![]() .
.
Рис.6. Логарифмическая амплитудно-фазовая частотная характеристика.

Годограф:
Так как годограф Найквиста не охватывает точку -1 то система является устойчивой.
30. Точность САР. Статическая САР показывает насколько точно САР поддерживает выходные корд-у при заданном знач. управляющ. велеч. Ошибка САР появ-я в результате действия возмущения. Действие возмущ. не зависит от сигн. упр-я. Возмущ. измен-я по произвольн. закону.
С![]() татическая
точность обозначается S.
Δyрег
– это отклонение выходн. корд. придейств.
возмущ. f
в замкн.
сист.
татическая
точность обозначается S.
Δyрег
– это отклонение выходн. корд. придейств.
возмущ. f
в замкн.
сист.
Δ![]() yнерег
- это отклон.
выходн. корд. при таком же действии
yнерег
- это отклон.
выходн. корд. при таком же действии
![]()
возмущения в разомкн. сист. Статизм связан с велечиной Крс
Δ![]() рс
= Δyнерег
Δзс
= Δyрег
рс
= Δyнерег
Δзс
= Δyрег
Статическая точн. может прест-я в % Проценты
взяты относит. того знач. кот. Задано
Структ. схема представл. на рис. может быть преставлена 2-мя видами САР:
статическая САР астотическая САР
Статическая САР – это такая САР у кот. все звенья в прям. и обрат. связи позиционные. Точность стат. САР опред-я выраж-м (1). Учитывая, что Крс нельзя сильно увелич., т.к. САР станов-я неустой-м, статич. САР может только уменьш. ошибку, но полностью её не ликвид-ть.
Статическая ошибка .Системы регулирования по точности разделяются на статические (т. е. имеющие статические ошибки) и астатические, которые имеют скоростную ошибку. Ошибки одномерной системы считаются по формулам:

![]() -
статическая ошибка,
-
статическая ошибка,
![]() -
динамическая ошибка, Wp-
структура регулятора, Wo-
структура объекта, ko-
коэффициент усиления объекта, k1
и k2-
коэффициент усиления регулятора.
-
динамическая ошибка, Wp-
структура регулятора, Wo-
структура объекта, ko-
коэффициент усиления объекта, k1
и k2-
коэффициент усиления регулятора.
![]() ,
астатической системой.
,
астатической системой.
32. Амплитудные и фазовые частотные характеристики. Амплитудную и фазовую характеристики можно объединить в одну общую – амплитудно-фазовую частотную характеристику (АФЧХ). АФЧХ представляет собой функцию комплексного переменного j :
W(j) = A( ) e j () (показательная форма), где A( ) – модуль функции; () – аргумент функции. Каждому фиксированному значению частоты i соответствует комплексное число W( ji ), которое на комплексной плоскости можно изобразить вектором, имеющим длину A(i ) и угол поворота (i ). Отрицательные значения (), соответствующие отставанию выходного сигнала от входного, принято отсчитывать по часовой стрелке от положительного направления действительной оси. При изменении частоты от нуля до бесконечности вектор W(j) поворачивается вокруг начала координат, при этом одновременно изменяется длина вектора. Кривая, которую при этом опишет конец вектора, и есть АФЧХ. Каждой точке характеристики соответствует определенное значение частоты. Амплитудно-фазовую частотную характеристику (АФЧХ) элемента находим из выражения (2.38) путем подстановки в него передаточной функции (2.51) при p = j : Вид АФЧХ на комплексной плоскости приведен на рис.
Из выражения (2.54) находим действительную и мнимую частотные характеристики
![]()
![]()
Подставляя значения этих характеристик в выражения (2.39) и (2.40), находим искомые выражения соответственно для амплитудной и фазовой частотных характеристик:
Графики амплитудной и фазовой частотных характеристик приведены на рис.

34. Классификация, принцип действия и устройство типовых регуляторов. Для регулирования объектами управления, как правило, используют типовые регуляторы, которые можно разделить на аналоговые и дискретные. К дискретным регуляторам относятся импульсные, релейные и цифровые. Аналоговые реализуют типовые законы регулирования, названия которых соответствуют названиям типовых звеньев. Входным сигналом для аналоговых регуляторов является величина ошибки регулирования, которая определяется как разность между заданным и текущим значениями регулируемого параметра (e = х – у). Выходным сигналом является величина управляющего воздействия u, подаваемая на объект управления. Преобразование входного сигнала в выходной производится согласно типовым законам регулирования. П-закон (пропорциональное регулирование), И -закон (интегральное регулирование), Д-закон (дифференциальное регулирование).
ПИ-регулятор (пропорционально-интегральный регулятор)
ПД-регулятор (пропорционально-дифференциальный регулятор)
ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор)