

Прием из кабеля сигналов, кодирующих битовый поток.
Выделение сигналов на фоне шума. Эту операцию могут выполнять различные специализированные микросхемы или сигнальные процессоры DSP. В результате в приемнике адаптера образуется некоторая битовая последовательность, с большой степенью вероятности совпадающая с той, которая была послана передатчиком.
Если данные перед отправкой в кабель подвергались скремблированию, то они пропускаются через дескремблер, после чего в адаптере восстанавливаются символы кода, посланные передатчиком.
Проверка контрольной суммы кадра. Если она неверна, то кадр отбрасывается, а через межуровневый интерфейс наверх, протоколу LLC передается соответствующий код ошибки. Если контрольная сумма верна, то из MAC-кадра извлекается кадр LLC и передается через межуровневый интерфейс наверх, протоколу LLC. Кадр LLC помещается в буфер оперативной памяти.
Интерфейсы клавиатуры и мыши.
Первое – это описание контактов разъема PS2. В разъеме MINIDIN 6 контактов, но используются только 4 из них.
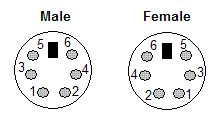
Слева нарисован разъем, который вставляется. Он устанавлявается на шнур мыши или клавиатуры. Справа нарисован разъем устанавливаемый на материнскую плату компьютера. Нумерация контактов у них, естественно зеркальная, потому, что при вставлянии одного разъема в другой сигналы одного имени должны совпадать. Сигналы интерфейса:
Data (передаваемые данные)
Not Implemented (не используетя)
Ground (Земля)
VCC (+5V) (Питание)
Clock (сигнал синхронизации передаваемых данных)
Not Implemented (не используется).
Второе – это электрический интерфейс. Клавиатура (или мышь) подключена к контроллеру на материнской плате по схеме «открытый коллектор». Что это такое? Схему можно нарисовать примерно так:

Схема «открытый коллектор» используется когда одним сигналом могут управлять несколько устройств. В нашем случае это контроллер на материнской плате и контроллер внутри клавиатуры. Они могут передавать данные навстречу друг другу. Например Клавиатура посылает коды нажатых клавиш, а компьютер посылает в клавиатуру команду зажечь светодиоды CAPS/NUM/SCROLL LOCK. В исходном состоянии, когда данные не передаются, оба сигнала Data и Clock находятся в логической единице (на них напряжение +5В). Такое состояние будет если оба контроллера снимут управляющее напряжение с транзисторов (ClockOut и DataOut) и они закрыты. Так как транзисторы закрыты, то сигналы «подтянуты вверх» к напряжению питания резисторами. Читать текущее состояние сигналов оба контроллера могут прямо с контактов DataIn и ClockIn. Управлять линией очень легко. Контроллер подает управляющее напряжение на базу транзистора (сигналы DataOut и ClockOut), он открывается, через него течет ток и соответствующий сигнал Data или Clock получается «притянут к земле», на нем получается логический ноль. Что делать если оба контроллера захотят одновременно передать навстречу друг другу? Ну во-первых, ничего страшного на физическом уровне не случится, ведь «притянутый к земле» сигнал «притянуть» еще раз не получится. Во-вторых, конечно это проблема для уровня передачи данных. Оба контроллера, как два вежливых собеседника, должны уметь слушать друг друга и дослушать до конца. Это обеспечивается специальным протоколом. Например контроллер, перед передачей своих данных не должен начинать передачу данных если состояние сигналов недавно менялось.
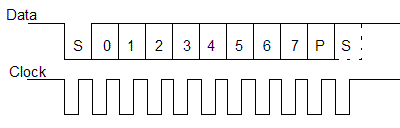
Третье - это протокол. При передаче от устройства (PS2 клавиатуры или PS2 мыши) к компьютеру используется следующий протокол. Устройство не начинает передачу, если Clock не находился в «1» по крайней мере 50 микросекунд. Устройство передает последовательно:
старт бит – всегда ноль;
8 бит данных;
бит четности;
стоп бит – всегда единица.
Устройство устанавливает/меняет сигнал Data когда Clock находится в логической единице. Контроллер на материнской плате читает данные, когда Clock находится в логическом нуле. Примерно так:
 Частота
сигнала Clock примерно 10-16.7кГц. Время от
фронта сигнала Clock до момента изменения
сигнала Data не менее 5 микросекунд. Так
написано в той статье, на которую я
сделал ссылку в начале. Четно говоря я
очень сомневаюсь, что производители
придерживаются этих значений.
Контроллер
материнской платы может сигнализировать
устройству о невозможности приема
опустив сигнал Clock в логический ноль.
На практике этого по моему тоже никто
не делает.
При передаче в обратную
сторону команд от контроллера на
материнской плате компьютера к клавиатуре
или мыши протокол отличается от описанного
выше.
Последовательность передаваемых
бит здесь хитрее:
Частота
сигнала Clock примерно 10-16.7кГц. Время от
фронта сигнала Clock до момента изменения
сигнала Data не менее 5 микросекунд. Так
написано в той статье, на которую я
сделал ссылку в начале. Четно говоря я
очень сомневаюсь, что производители
придерживаются этих значений.
Контроллер
материнской платы может сигнализировать
устройству о невозможности приема
опустив сигнал Clock в логический ноль.
На практике этого по моему тоже никто
не делает.
При передаче в обратную
сторону команд от контроллера на
материнской плате компьютера к клавиатуре
или мыши протокол отличается от описанного
выше.
Последовательность передаваемых
бит здесь хитрее:
хост контроллер опускает сигнал Clock в ноль на время примерно 100 микросекунд;
хост контроллер опускает сигнал Data в ноль формируя старт бит;
хост контроллер отпускает сигнал Clock в логическую единицу, клавиатура фиксирует старт бит;
далее клавиатура генерирует сигнал Clock, а хост контроллер подает передаваемые биты;
после того, как хост контроллер передал все свои биты, включая бит четности и стоп бит, клавиатура посылает последний бит «ноль», который является подтверждением приема.
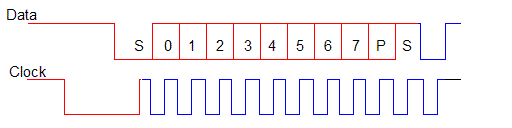 Поскольку
одним сигналом управляют два устройства,
то довольно трудно понять, кто в данный
момент времени управляет сигналом.
Именно по этому диаграмма нарисована
двумя цветами. Красный цвет – сигнал
управляется хост контроллером, а синий
– сигнал управляется клавиатурой.
Поскольку
одним сигналом управляют два устройства,
то довольно трудно понять, кто в данный
момент времени управляет сигналом.
Именно по этому диаграмма нарисована
двумя цветами. Красный цвет – сигнал
управляется хост контроллером, а синий
– сигнал управляется клавиатурой.
Четвертое - это коды и команды, которые посылают мыши, клавиатуры и контроллер компьютера. Это довольно сложная тема... Пожалуй опишу все это в следующей статье.