

25.2 Использование параметрических сплайнов для интерполирования кривых
Отличие заключается в том,что для кривой возможна ситуация,когда одному знаению независ. Переменной соответствует несколько ординат точек.В том аппарате построения сплайнов который мы обсуждаем до настоящего времени было введено предположение
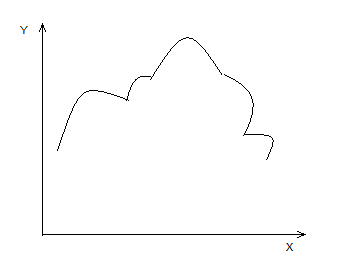
Когда по произвольной сис-ме точек р1,р2,р3…рn необходимо построить кривую проходящую через эту сис-му,то использовать этот аппарат невозможно,в этом случ. Можно использовать так называемые параметрические сплайны на основе обычных сплайнов можно ввести так назыв. Естественную параметризацию выбрав в качестве незав.переменгой параметр S ,который будет представлять длину дуги кривой от начальной точки до текущей тогда x=x(S); y=y(S)
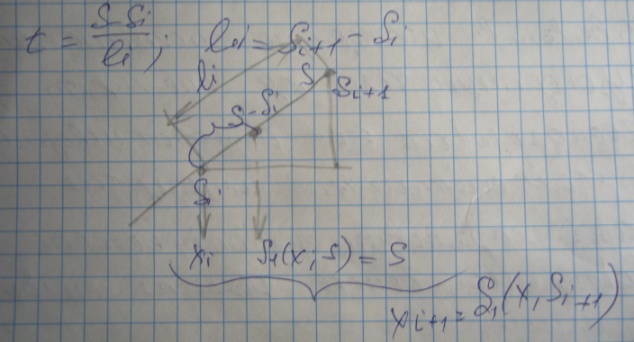
В качестве простейшего примера рассмотрим интерполяцию параметрического сплайна 1 степени.
S1(x,S)=(1-t)*xi+t*xi+1
S1(y,S)=(1-t)*yi+t*yi+1
Эта пара сплайнов наз-ется параметрическими сплайнами
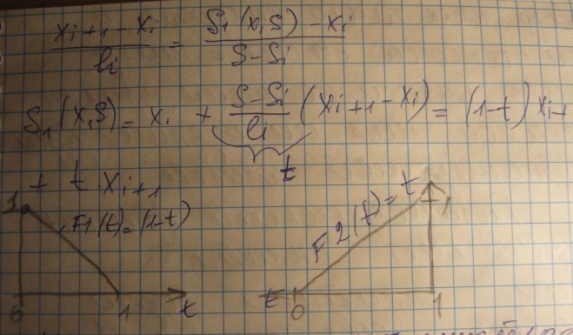
можно заметить ,что линейные функ-ии F1(t) и F2(t) являются аналогами тех ф-ий формы F1(t), F2(t), F3(t), F4(t) ,которые использовались в эрмитовом кубическом сплайне,там они были кубическими полиномами точно такие же ормулы получаются и по переменной.Отметим некоторые св-ва этого параметрического сплайна .Координаты точек такого сплайна и угол наклона касат. к нему можно вычисл. Не имея практически никакоц информации о длине дуги интерполируемой кривой.
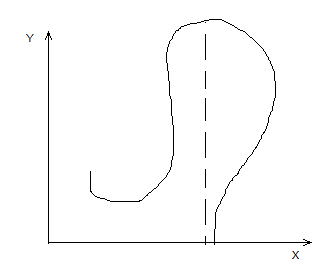
26.1 Пример реализации метода типа Монте-Карло в среде Mathcad для вычисления площади произвольной фигуры



Фрагмент документа маткад:
ORIGIN:=1,
AB(x,y):=x,
Cd(x,y):=y
x:=0,y:=0 – начальные значения переменных
f(x,y):=x-y +4
g(x,y):=x + y +x+y-25
 Given
Given
f(x,y)>=0,
g(x,y)<=0,
z:=Minimize(AB,x,y) min по корд. х
a:=AВ(z1,z2)
a=-4
 Given
Given
f(x,y)>=0,
g(x,y)<=0,
z:=Maximize(AB,x,y) max по корд. х
b:=AВ(z1,z2)
b=4.55
Given
f(x,y)>=0,
g(x,y)<=0,
z:=Minimize(Cd,x,y) min по корд. y
c:=Cd(z1,z2)
c=-2.825
Given
f(x,y)>=0,
g(x,y)<=0,
z:=Maximize(Cd,x,y) max по корд. y
d:=Cd(z1,z2)
d=2.719
Задаем число экспериментов:
N:=4000
-описание процедуры,которая возвращает к-во точек из N сгенерированных и их координаты -описание процедуры,которая возвращает к-во точек из N сгенерированных и их координаты попавшие в нашу нужную область.
Изобразим обращение к этой процедуре:
![]()
![]()
Площадь фигуры
26.2 Параметрический Эрмитов кубический сплайн.
Этот сплайн представляет собой совокупность двух Эрмитовых сплайнов.

 (7)
(7)
 -
производная по S
от x(S)
в точке Si.
-
производная по S
от x(S)
в точке Si.
Для
возможности вычисления по формуле (7)
необходимо определить
 .
.
Поскольку в реальных задачах информация о наклонах обычно отсутствует, то, как и в случае обычного Эрмитова сплайна , заменим их приближенными значениями.
Поскольку точное значение параметра вычислить невозможно, то будем строить Эрмитов сплайн близкий к сплайну 7 в некотором смысле.
Во-первых, для описания сплайна введем параметризацию по суммарной длине хорд.

где

Во-вторых, точные значения производных заменим по приближенным разностным формам.
 (8)
(8)
 (9)
(9)
 (10)
(10)
где

Эти формулы используются в том случае, если кривая не замкнута. Если кривая замкнута, то вместо формул 8 и 10 используем:
 (11)
(11)

Рекомендации по выбору узлов:
1.
Следует выбирать узлы так, чтобы
 (то есть, чтобы длины звеньев были
практически одинаковы);
(то есть, чтобы длины звеньев были
практически одинаковы);
2. В точках излома кривой следует вводить по два близких узла. В этом случае будет снижена асцилляция кривой, заключающаяся в том, что сплайн сильно уклониться от истинной кривой.