18.2 Использование встроенных функций для линейной аппроксимации по методу наименьших квадратов
Vx и Vy – заранее сформированные массивы абсцисс и ординат .
m:=slope(vx,vy)
b:=interapt(vx,vy)
x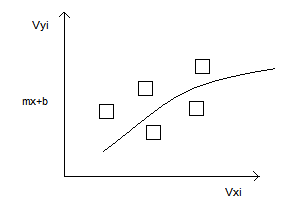 -
Массив точек в который мы хотим вычленить
mx+b
-
Массив точек в который мы хотим вычленить
mx+b
19.1 Связь модифицированных методов Эйлера и методов Рунге-Кута второго порядка для решения задачи Коши
Методы второго порядка.q=1,∆y≈Ao*ϕо +Aо*ϕ1,в этой ситуации у нас есть параметры α1,β10,Ао,А1. Можно показать, что эти четыре величины оказываются связанными между собой следующей системой нелинейных уравнений :
как видно количество уравнений меньше числа неизвестных ,это позволяет положить один из параметров равным какому-то значению, а остальные три определить через него
α1= β10=1/2А1,
Aо=1- A1,
А1=1/2,
Ао=1/2,
α1= β10=1,
∆y≈Ao*ϕо +A1*ϕ1,
ϕо=h*f(x,y),
ϕ1=h*f(x+h,y+ ϕо),
Пусть A1=1,A0=0, α1= β10=1/2, тогда
∆y≈ ϕ1,
ϕо=h*f(x,y),
ϕ1=h*f(x+h,y+ ϕо) это другая модификация метода Эйлера.
Могут быть получены и др. формулы метода второго порядка, и как видно модификации метода Эйлера-частные случаи метода Рунге-Кутта. Приведем систему уравнений для методов 3-го порядка.
q=2
 A1+A2+A0=1,
A1+A2+A0=1,
A1* α1+A2* α2=1,
A1* α1+A2* α2=1/3,
A2* α1* β21=1/6,
β20+ β21= α2,
β10= α1,
∆y≈1/6(ϕо+ 4* ϕ1+ ϕ2),где ϕо=h*f(x,y),
ϕ1=h*f(x+h/2,y+ ϕо/2),
ϕ2=h*f(x+h,y- ϕо + 2ϕ1),
∆y≈ ( ϕ0+3
ϕ2),
( ϕ0+3
ϕ2),
ϕо=h*f(x,y),
ϕ1=h*f(x+h/3,y+ ϕо/3),
ϕ2=h*f(x+2/3*h,y- ϕо + 2/3*ϕ1)
19.2 Понятие о сплайнах
Функция Sn,ν (x) – сплайн степени n дефекта ν, где n и ν - целые числа, если
на каждом из отрезков (xi, xi+1) из (a,b) функция Sn,ν (x) является полиномом степени n;
если Sn,ν (x) на всем интервале (a,b) имеет непрерывные производные до порядка
n- ν включительно.
Кусочные полиномы, образующие сплайн, называются звеньями, а условия непрерывности в узлах____
Рассмотрим сплайн 1-ой степени S1(x). Он представляет собой непрерывную кусочно-линейную функцию. На каждом из отрезков (xi, xi+1) он является полиномом 1-ой степени:
S1 (x) = A0+A1∙x
ν=1, т.е. непрерывной производной он не имеет.
Уравнение сплайна:
S1(x)
= +
+
 (
( ),
xi
),
xi i+1
i+1
hi =xi+1 – xi - шаг
Для построения этого сплайна требуется только таблица (xi ,yi). Вычисление этого сплайна можно выполнять по следующему алгоритму:
определение tg угла наклона:
tgαi
=
 =
=

и вычисляется S1 (x)= +Ui ∙ (x – xi ).
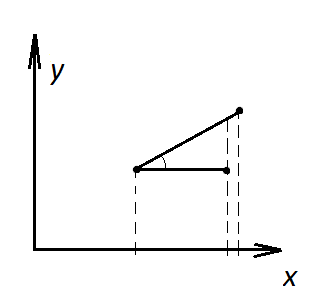

(xi+1,yi+1)

Ui(x-xi)
 (xi,yi) α
(xi,yi) α
S1(x)
yi
xi x xi+1
Сплайн 1-ой степени относится к семейству локальных сплайнов, т.к. для его построения необходима информация только об ограничивающих данный участок узлах.
20.1 Метод Рунге-Кута 4-ого порядка для решения задачи Коши формулы метода и их реализация в среде MathCad

 ;
;

___________________________________________________________________________