

Дайте понятие шагового электродвигателя (шд). Приведите классификацию шд. Объясните принцип действия шагового двигателя.
По принципу работы шаговый двигатель (ШД) является синхронным двигателем. Отличие от последнего заключается в том, что магнитное поле ШД перемещается в воздушном зазоре дискретно (шагами). Вследствие этого движение ротора состоит из последовательных элементарных шагов. Для получения такого движения обмотки ШД подключаются в определенном порядке к источнику питания.
По принципу действия ШД делятся на три типа:
1) двигатели с ротором, представляющим собой постоянный магнит (магнитоэлектрические);
2) синхронные реактивные двигатели с переменным магнитным сопротивлением (индукторные);
3) гибридные (или синхронные реактивные) двигатели, которые обладают свойствами двигателей первых двух типов.
По числу фаз — ШД разделяются на однофазные, двухфазные и многофазные; по числу пакетов стали магнитопровода — на однопакетные, двухпакетные и многопакетные; по способу фиксации ротора при обесточенных обмотках управления — на двигатели с внутренней и внешней фиксацией.
Принцип работы ШД рассмотрим на примере простейшей схемы двухфазного ШД (рисунок 1а).
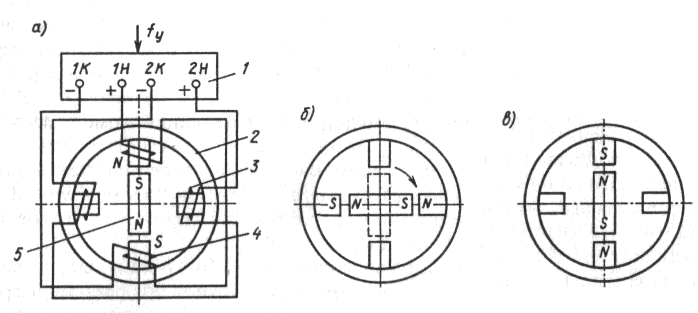
Рисунок 1 – Схемы двухфазного ШД
ШД имеет на статоре две пары явно выраженных полюсов, на которых находятся обмотки возбуждения (управления): обмотка 4 с выводами 1Н - 1К и обмотка 3 с выводами 2Н - 2К. Каждая из обмоток состоит из двух частей, находящихся на противоположных полюсах статора 2. Ротором в рассматриваемой схеме является двухполюсный постоянный магнит 5. Питание обмоток осуществляется импульсами напряжения, поступающими с блока управления 1, который преобразует одноканальную последовательность входных импульсов управления с частотой fу в многоканальную по числу фаз ШД.
Предположим, что в начальный момент времени напряжение подается на обмотку 4. Прохождение тока по этой обмотке вызывает появление магнитного поля статора 2 с вертикально расположенными полюсами N – S. В результате взаимодействия этого поля с постоянным магнитом (ротором), последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают. Положение будет устойчивым, поскольку при отклонении от него на ротор будет действовать момент, стремящийся вернуть его в положение равновесия:
М = Мmax∙sinα, (1)
где α - угол между осями магнитных полей статора и ротора; Мmax – максимальный момент.
Затем с помощью блока управления 1 напряжение снимается с обмотки 4 и подается на обмотку 3. В этом случае образуется магнитное поле статора с горизонтальными полюсами (рисунок 1б), т.е.магнитное поле дискретно совершило поворот на четверть окружности статора. При этом между осями статора и ротора появляется угол рассогласования α = 90 ° и на ротор будет действовать в соответствии с формулой (1) вращающий момент М = Мmax, под действием которого он повернется на четверть окружности статора и займет новое устойчивое равновесное положение, показанное сплошной линией на рисунке.
Для поворота ротора в том же направлении необходимо отключить обмотку 3 и подать питание на обмотку 4, но с противоположной по сравнению с рисунком 1а полярностью напряжения. Магнитное поле статора опять будет иметь вертикально расположенные полюсы, но с другой по сравнению с рисунком 1а, полярностью. Магнитное поле совершит шаг на четверть окружности, и на ротор будет действовать синхронизирующий момент, который повернет его в положение, показанное на рисунке 1в. Затем необходимо отключить обмотку 4 и подключить обмотку 3 с обратной полярностью напряжения. И, наконец, ротор завершит полный оборот при снятии напряжения с обмотки 3 и подаче напряжения на обмотку 4.