

Система подчиненного регулирования.
Для управления движением ИО, иногда требуется регулировать несколько координат ЭП. Например, ток (момент) и скорость. В этом случае, замкнутые ЭП выполняются по схеме с подчиненным регулированием координат.
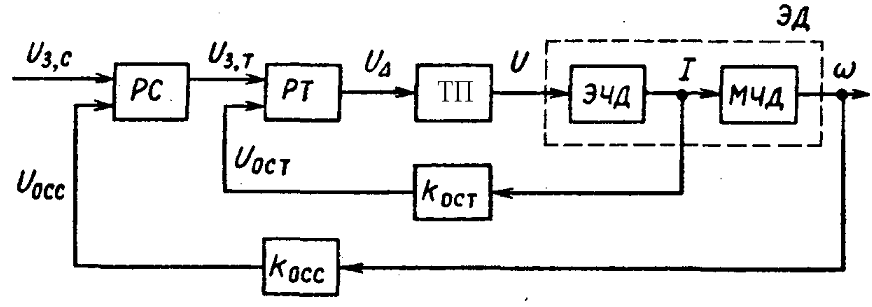
Рисунок 2 – Структурная схема двухконтурной системы подчинённого регулирования
В данной схеме регулирование каждой координаты осуществляется собственными регуляторами (тока РТ и скорости РС), которые вместе с соответствующими обратными связями с коэффициентами Кост и Косс, образуют замкнутые контуры. Эти контуры располагаются таким образом, что входным (задающим) сигналом для контура тока Uзт является выходной сигнал внешнего по отношению к нему контура скорости. Таким образом, внутренний контур тока будет подчинен внешнему контуру скорости – основной регулируемой координате ЭП. Сигнал U∆ с выхода РТ подаётся на тиристорный преобразователь ТП. Электродвигатель ЭД представлен двумя частями: электрической (ЭЧД) и механической (МЧД).
Основное достоинство такой схемы заключается в возможности оптимальной настройке регулирования каждой координаты. Кроме того, подчинение контура тока к контуру скорости позволяет упростить процесс ограничения тока и момента, для чего необходимо лишь поддерживать на соответствующем уровне сигнал на выходе регулятора скорости (сигнал задания) уровня тока.
Объясните, для чего предназначены статические преобразователи частоты с промежуточным звеном постоянного тока (СПЧ ПЗПТ). Приведите структурные схемы СПЧ ПЗПТ, отличающиеся способом регулирования напряжения на статоре АД.
СПЧ ПЗПТ предназначены для преобразования переменного напряжения с постоянной амплитудой и частотой в переменное напряжение с регулируемой амплитудой и частотой.
Существуют три вида СПЧ ПЗПТ в зависимости от способа регулирования напряжения:
1. СПЧ ПЗПТ с управляемым выпрямителем
В этой схеме напряжение по амплитуде регулируется на выходе выпрямителя (рисунок 1).
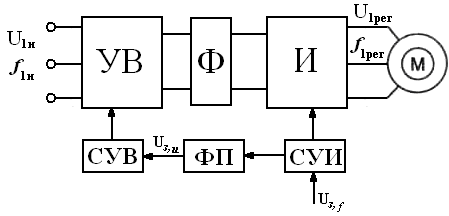
Рисунок 1 - СПЧ ПЗПТ с управляемым выпрямителем
УВ – управляемый выпрямитель, преобразует энергию переменного тока в энергию постоянного тока.
Ф – фильтр, служит для сглаживания пульсации тока и напряжения.
И – инвертор, служит для преобразования постоянного тока в переменный ток.
СУВ – система управления выпрямителем.
СУИ – система управления инвертором.
ФП – функциональный преобразователь, служит для преобразования сигнала задания частоты Uз.f. в сигнал задания напряжения Uз.u. в зависимости от реализуемого закона частотного управления.
В зависимости от вида фильтра Ф в звене постоянного тока, автономный инвертор И делиться на АИ тока и АИ напряжения. В СПЧ на основе АИ тока, фильтр представляет собой реактор L с большой индуктивностью (рисунок 2а). Такой инвертор является источником тока, поэтому в этой схеме управляющим воздействием на двигатель является частота и ток статора.

Рисунок 2 - Схемы фильтров
АИ напряжения является источником напряжения, для чего фильтр кроме индуктивности L содержит конденсатор C большой ёмкости (рисунок 2б). Управляющим воздействием на двигатель в системе СПЧ с АИ напряжения являются амплитуда и частота напряжения.
2. СПЧ ПЗПТ с неуправляемым выпрямителем и преобразователем с широтно-импульсным управлением (ПШИУ) в звене постоянного тока (рисунок 3).
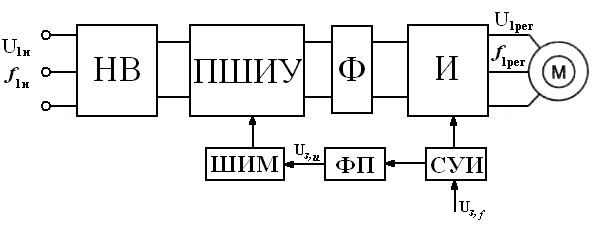
Рисунок 3 - СПЧ ПЗПТ с неуправляемым выпрямителем и ПШИУ
В этом случае регулирование напряжения осуществляется в ПШИУ, который устанавливается между неуправляемым выпрямителем НВ и инвертором И. Нерегулируемое постоянное напряжение с НВ поступает на ПШИУ, где регулируется по величине преобразовываясь в последовательность прямоугольных импульсов, фильтруется фильтром Ф и поступает на вход инвертора И.
3. СПЧ ПЗПТ с неуправляемым выпрямителем и с широтно-импульсной модуляцией напряжения в инверторе (рисунок 4).
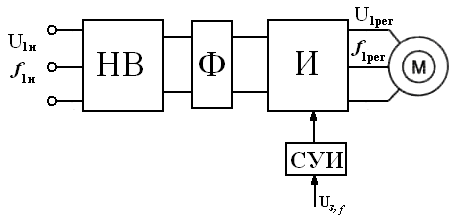
Рисунок 4 - СПЧ ПЗПТ широтно-импульсной модуляцией напряжения в инверторе
В этой схеме регулирование амплитуды напряжения и частоты совмещено в И. Широтно-импульсная модуляция достигается с помощью сложного алгоритма переключения вентилей и может реализовываться только в преобразователях с управляемыми ключами: с силовыми транзисторами или с тиристорами с искусственной коммутацией.