

Перечислите основные блоки, из которых состоит функциональная схема следящего электропривода постоянного тока релейного действия и проанализируйте её принцип действия
В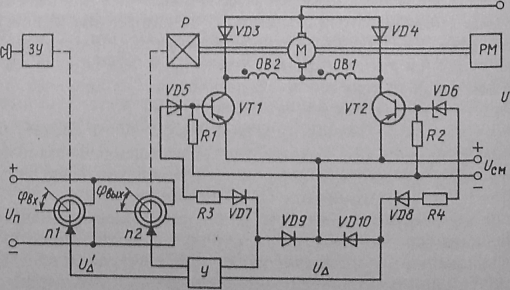 схеме ЭП используется ДПТ последовательного
возбуждения М c двумя
обмотки возбуждения ОВ1 и ОВ2 (рисунок
1). Управление двигателем осуществляется
с помощью силовых транзисторов VT1
или VT2.
схеме ЭП используется ДПТ последовательного
возбуждения М c двумя
обмотки возбуждения ОВ1 и ОВ2 (рисунок
1). Управление двигателем осуществляется
с помощью силовых транзисторов VT1
или VT2.
Рисунок 1 - Функциональная схема следящего электропривода постоянного тока релейного действия
Разрядные диоды VD3 и VD4 служат для снятия перенапряжений, возникающих при отключении обмоток якоря и возбуждения, которые обладают значительной индуктивностью.
В качестве датчиков входной и выходной величин используются кольцевые потенциометры П1 и П2, которые образуют потенциометрический измеритель рассогласования. Их питание осуществляется постоянным напряжением Uп.
Движок потенциометра П1 (датчик входной величины) связан с выходным валом задающего устройства ЗУ, который представляет собой в данном случае редуктор с ручным приводом. Движок потенциометра П2 (датчик выходной величины) связан с валом редуктора Р, расположенного на валу ДПТ и рабочей машины РМ. Редукторы ЗУ и Р имеют одинаковое передаточное число. Сигнал рассогласования U снимается с П1 и П2. При их одинаковом угловом положении U=0. При этом равен о и сигнал U на выходе усилителя У, транзисторы VT1 и VT2 закрыты и ДПТ неподвижен.
При возникновении угла рассогласования вхвых движков потенциометров П1 и П2, вызванного поворотом рукоятки ЗУ, сигналы U и U становятся отличными от нуля. В зависимости от полярности сигнала U, которая определяется знаком , сигнал U подается на транзистор VT1 (по цепи диод VD10 – стабилитрон VD5 – резистор R3 – диод VD7) или VT2 (по цепи диод VD9 – стабилитрон VD6 – резистор R4 – диод VD8). Если этот сигнал превышает порог срабатывания стабилитронов VD5 или VD6, то соответствующий транзистор откроется, подключая ДПТ к источнику питания с напряжением U. Двигатель начнет вращаться, поворачивая вал РМ и ось движка потенциометра П2 в направлении, при котором возникшее рассогласование в системе будет стремиться к нулю. Когда сигнал U станет меньше напряжения открывания стабилитронов VD5 или VD6, работающий транзистор (VT1 или VT2) закроется и отключит ДПТ от источника питания.
В данной схеме ЭП отрабатывает заданное перемещение вх с некоторой погрешностью, обусловленной нечувствительностью системы из-за наличия порога срабатывания стабилитронов VD5, VD6. Зона нечувствительности системы должна быть минимальной в пределах 2…3 угла рассогласования.
Достоинство таких следящих ЭП заключается в простоте и надежности, а недостатком является наличие определенной нечувствительности (неточности) при слежении.
Перечислите основные блоки, из которых состоит функциональная схема следящего электропривода переменного тока пропорционального действия и проанализируйте принцип ее действия
В маломощных (до 1кВт) следящих ЭП переменного тока обычно используют двухфазные короткозамкнутые АД, в том числе и с полым ротором (рисунок 1).
Двигатель М имеет обмотки возбуждения LM2 и управления LM1, которые питаются сдвинутыми по фазе на 90 напряжениями. Регулирование скорости АД осуществляется изменением действующего значения напряжения на ОУ LM1, которая получает питание от фазы А трехфазной сети переменного тока через тиристоры VS1…VS4. Обмотка возбуждения LM2 связана с фазами В и С через тиристоры VS5 и VS6. Тиристоры VS1…VS6 образуют стандартные схемы регуляторов напряжения переменного тока. Они попарно включены по встречно-параллельной схеме, что обеспечивает протекание тока по обмоткам в оба полупериода питающего напряжения.
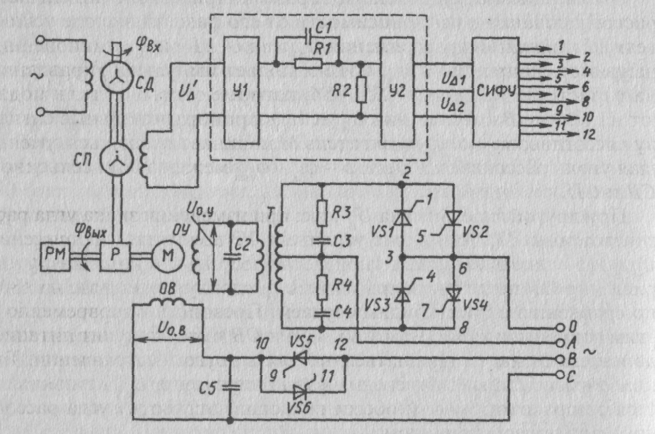
Рисунок 1 - Функциональная схема следящего электропривода переменного
тока пропорционального действия
Рассогласование между задающей осью и валом ЭП измеряется с помощью сельсинной пары, состоящей из сельсина-датчика СД и сельсина-приемника СП. Положение ротора СД определяет входной сигнал вх, а положение ротора СП зависит от угла поворота вала ЭП вых. Сигнал рассогласования U, снимаемый с обмотки статора СП, пропорционален разности углов вх и вых, а фаза этого напряжения определяется знаком этой разности (ошибки).
Сигнал рассогласования U подается на вход фазочувствительного усилителя У1. После прохождения через корректирующее звено, состоящее из резисторов R1, R2 и конденсатора С1, сигнал рассогласования усиливается усилителем У2 и в виде напряжений U1 или U2 поступает на блок управления тиристорами.
Схема работает следующим образом. При появлении сигнала рассогласования U в зависимости от его фазы на выходе усилителя У2 появляются напряжения U1 или U2. При возникновении, например, напряжения U1 СИФУ подает импульсы управления на тиристоры VS1, VS2, VS5, VS6, которые открываются и подают на ОУ и ОВ напряжения Uо.у. и Uо.в., пропорциональные сигналу рассогласования U1. Двигатель М начинает вращаться, уменьшая угол рассогласования вхвых между осями сельсинов СД и СП.
При другой фазе сигнала U , т.е. при изменение знака угла рассогласования , на выходе усилителя У2 появляется напряжение U2.
Этот сигнал включает тиристоры VS3, VS4, и на ОУ подается напряжение Uо.у., сдвинутое по фазе на 180 по сравнению с предыдущим случаем. Поскольку одновременно с этим откроются тиристоры VS5, VS6 и ОВ также получит питание, двигатель М начнет вращаться, но уже в другом направлении. Таким образом, за счет фазы напряжения Uо.у. осуществляется реверс двигателя М, обеспечивающий отработку угла рассогласования с любым знаком.
Конденсатора С2…С5 и резисторы R3, R4 служат для сглаживания пульсаций напряжения на обмотках двигателя.