

Дайте понятие управляющей программы. Приведите алгоритм ручной подготовки управляющих программ для систем с чпу.
Исходная информация для подготовки управляющей программы (УП) содержится в чертеже детали, выполненном инженером-конструктором Задачи перевода информации, заключенной в чертеже, на язык, воспринимаемый системой ЧПУ, решаются технологом-программистом.
УП - объем информации, зафиксированной на одном из видов программоносителей, достаточный для выполнения требуемой технологической операции по обработке изделия. УП представляется в виде буквенно-цифрового кода и может быть подготовлена ручным или автоматизированным (автоматическим) методом.
При ручном программировании (рисунок 1), применяемом в основном при малом количестве станков с ЧПУ, на основании чертежа детали составляют таблицу с программой, в которой зафиксированы все рабочие движения станка во временной последовательности. Расчеты выполняются вручную с использованием простейших вычислительных средств.
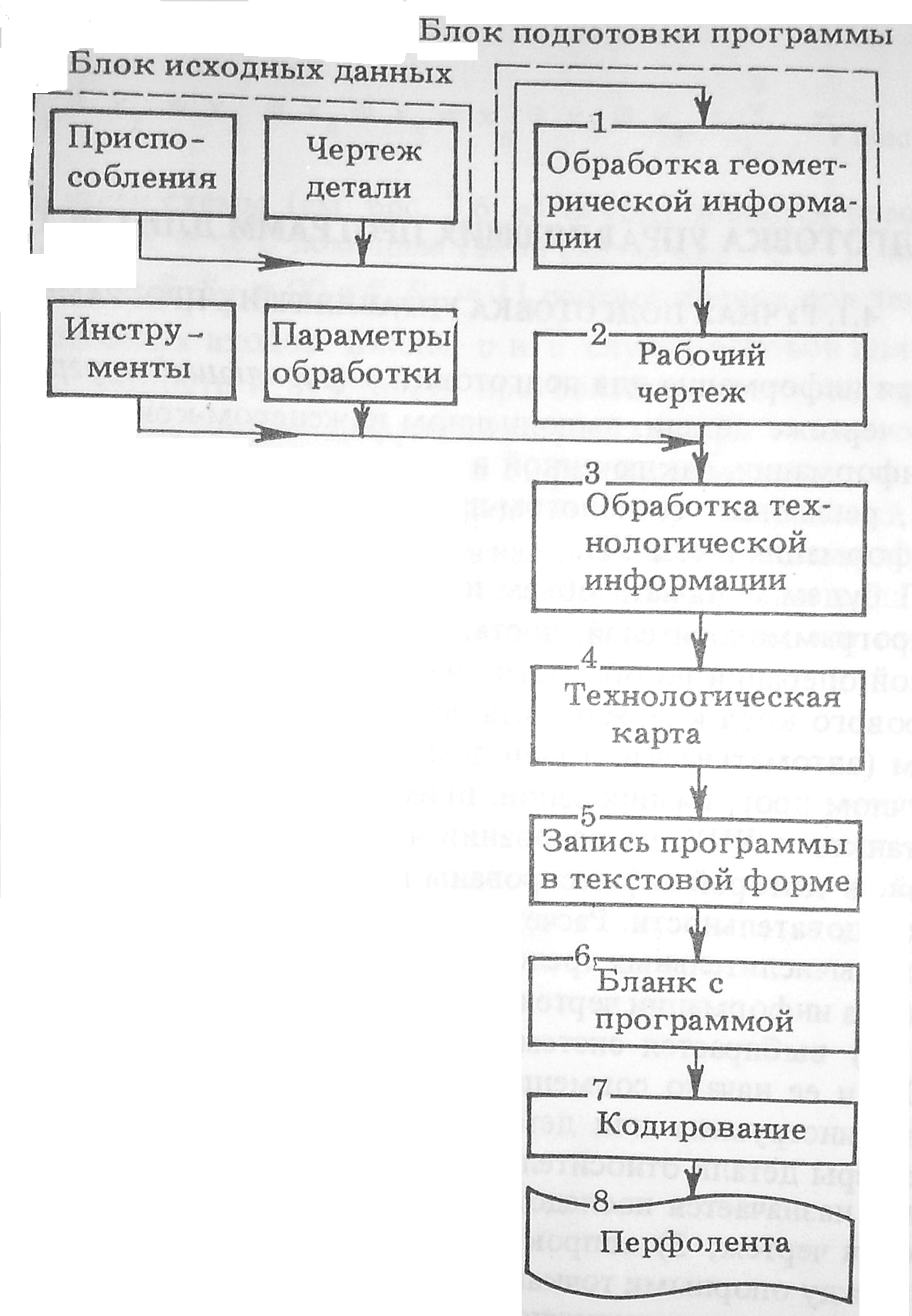
Рисунок 1 - Алгоритм ручной подготовки управляющих
программ для систем с ЧПУ
Обработка информации чертежа производится в такой последовательности (рисунок):
1) выбирается система координат и ее начало совмещается с исходной точкой, в которую удобно "выставить" инструмент или деталь перед началом обработки;
2) проставляются размеры детали относительно координатных осей, выбираются опорные точки и назначается последовательность их обхода; на этой основе готовится рабочий чертеж;
3) аппроксимируются типовыми кривыми траектории движения между опорными точками с учетом возможностей системы ЧПУ (отрезками прямых, дугами окружностей, участками параболы и т.д.);
4) обрабатывается технологическая информация (назначаются режимы резания, инструменты и т.д.) и составляется технологическая карта;
5) определяются приращения координат опорных точек в единицах длины и переводятся в число дискрет в соответствии с разрешающей способностью системы ЧПУ;
6) производится запись программы в текстовой форме; полученная УП наносится на перфоленту.
Начертите структурную схему программируемого контроллера. Приведите его характерные свойства и принцип действия.
Термин «программируемый» отражает возможность ПК воспринимать программу на языке высокого уровня, а «контроллер» — возможность выполнять функции управления сложными технологическими процессами (сложными станками, литейными комплексами, машинами для обработки металлов давлением, автоматическими линиями).
ПК имеют ряд характерных свойств:
как правило, ПК предназначены для решения логических задач с элементами арифметических операций;
упрощенное программирование, основанное на символах и мнемокодах, которое легко усваивается персоналом, не имеющим специальной подготовки;
большая помехозащищенность, потенциальная развязка от внешних цепей с помощью оптронов, ферритовых устройств и др., что дает возможность применять ПК в цеховых условиях;
модульность конструкции (входы, выходы и объем
памяти наращиваются с определенным шагом);
наличие вспомогательных устройств для выполнения дополнительных функций (таймеры для выдержки времени, счетчики импульсов и др.).
Программируемый контроллер состоит из центрального процессора, модуля памяти (ПЗУ), модулей входов-выходов, обеспечивающих сопряжение с входными датчиками и исполнительными устройствами объекта управления, и сканирующего устройства, которое производит поочередный опрос входов и выходов. К контроллеру подключается пульт программирования, через который производится набор программы.
Помимо ручного ввода программы большинство ПК предусматривает возможность связи с другим ПК или ЭВМ. Возможно также подключение дисплея, печатающего устройства и модуля вспомогательной памяти.
Содержание вычислительного процесса заключается в решении логических уравнений типа
Y= F(X,) с помощью которых описывается алгоритм управления объектом. Набор выходных функций Yi состоит из выходных функций, поступающих на объект для осуществления функций управления, и внутренних функций, не имеющих реального выхода и ограничивающих область своего действия самой программой; их можно назвать промежуточными выходами. Сюда же относятся сигналы таймеров, счетчиков. Набор входных функций Xi включает сигналы датчиков, а также внутренних устройств ПК (таймеров, счетчиков). Таким образом, в течение цикла своей работы ПК обменивается информацией с внешней средой и осуществляет обработку этой информации в соответствии с записанной в нем программой.
Система команд ПК представляет собой набор инструкций (команд), обеспечивающих оперативный ввод, контроль и редактирование рабочей программы управления объектом.
По назначению инструкции ввода можно разделить на программные, функциональные и оперативные.
Программные инструкции, записанные в рабочую программу ПК, определяют, «что» и «с чем» надо сделать, и состоят из кода операции («что») и адреса операнда («с чем»). Некоторые программные инструкции являются безадресными, т.е. состоят только из кода операции, и выполняются в последовательности, определенной записью программы.
Функциональные инструкции служат для пуска и выбора режима программирующего устройства и ввода, редактирования и контроля рабочей программы. В большинстве ПК эти инструкции решаются аппаратно и не занимают рабочей памяти программы.
Оперативные инструкции имеют своей целью активное вмешательство в работу процессора, возбуждение реальных входов и выходов и некоторые другие. Оперативные инструкции имеются не во всех модулях ПК.
Практические задания
Перечислите элементы, из которых состоит схема управления пуском двигателя постоянного тока параллельного возбуждения в функции электродвижущей силы (ЭДС) и динамического торможения в функции времени и проанализируйте ее принцип действия.
В этой схеме в качестве датчика ЭДС используется якорь двигателя М, к которому подключены катушки контакторов ускорения КМ1 и КМ2 (рисунок 1а). С помощью регулировочных резисторов Rу2 и Rу1, эти контакторы настраиваются на срабатывание при определенных скоростях двигателя.
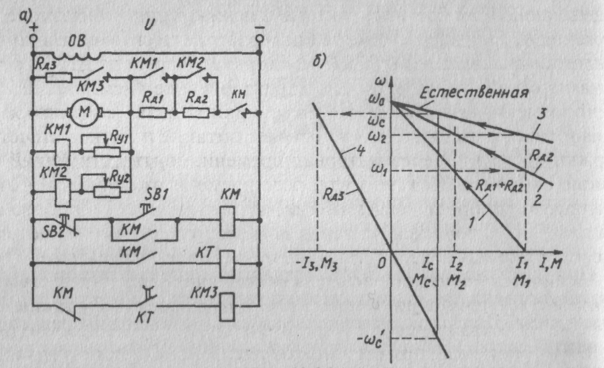
а) схема пуска ДПТ ПВ в функции ЭДС и динамического торможения в функции времени
б) механические (электромеханические) характеристики ДПТ ПВ
Рисунок 1 – Пуск и торможение ДПТ
Для осуществления торможения в схеме предусмотрен резистор Rд3 подключение и отключение, которого осуществляется контактором торможения КМЗ. Для обеспечения необходимой при торможении выдержки времени используется электромагнитное реле времени КТ, замыкающий контакт которого включен в цепь катушки контактора торможения КМ2.
После подключения схемы к источнику питания происходит возбуждение ДПТ, при этом все управляющие аппараты схемы остаются в исходном положении. Пуск ДПТ осуществляется нажатием кнопки SВ1, что приводит к срабатыванию линейного контактора КМ, подключению двигателя к источнику питания и началу его разбега с включенными резисторами в цепи якоря Rд1+ Rд2 по характеристике 1 (рисунок 1б). По мере увеличения скорости растет ЭДС двигателя и соответственно напряжение на катушках контакторов КМ1 и КМ2. При скорости ω1, срабатывает контактор КМ1, закорачивая своим контактом первую ступень пускового резистора Rд1, и двигатель начинает работать по характеристике 2. При скорости ω2 срабатывает контактор КМ2, закорачивая вторую ступень пускового резистора Rд2. При этом двигатель выходит на работу по естественной характеристике 3 и заканчивает свой разбег в точке установившегося режима, определяемой пересечением естественной характеристики 3 двигателя и характеристики нагрузки ω (Мс).
Для перехода к режиму торможения необходимо нажать кнопку SВ2. При этом произойдет следующее. Катушка контактора КМ потеряет питание, разомкнется замыкающий силовой контакт КМ в цепи якоря ДПТ и последний отключится от источника питания. Размыкающий же блок-контакт КМ в цепи катушки контактора торможения КМЗ замкнется, последний сработает и своим главным контактом подключит резистор Rд3 к якорю М, переводя ДПТ в режим динамического торможения по характеристике 4. Одновременно разомкнется замыкающий контакт контактора КМ в цепи реле времени КТ, оно потеряет питание и начнет отсчет выдержки времени. Через интервал времени, соответствующий снижению скорости ДПТ до нуля, реле времени отключится и своим контактом разорвет цепь питания контактора КМЗ. При этом резистор Rд3 отключается от якоря М двигателя, торможение заканчивается и схема возвращается в свое исходное положение.
Перечислите элементы, из которых состоит схема управления асинхронным двигателем с короткозамкнутым ротором, обеспечивающую его прямой пуск и динамическое торможения в функции времени и проанализируйте ее принцип действия.
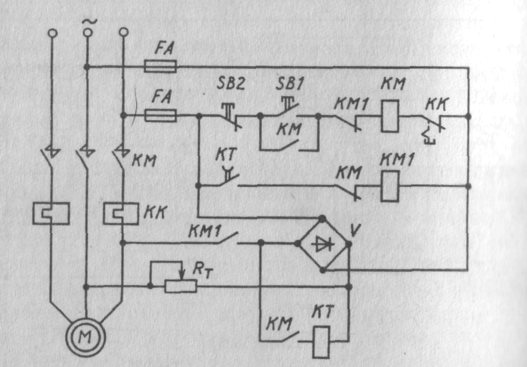
Пуск двигателя в этом случае осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременное замыкание контакта КМ в цепи реле времени КТ вызовет срабатывание последнего и замыкание его контакта в цепи контактора торможения КМ1, который, тем не менее, не сработает, так как в этой цепи разомкнулся размыкающий контакт КМ.
Для остановки АД необходимо нажать кнопку SB2. Тогда контактор КМ отключится и, разомкнув свои контакты в цепи статора, отключит двигатель от сети переменного тока. Одновременно с этим замкнется контакт КМ в цепи аппарата КМ1 и разомкнется контакт КМ в цепи реле КТ, что приведет к включению контактора торможения КМ1, подаче в обмотке статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начнет отсчет выдержки времени. Через некоторый интервал времени, соответствующий времени останова двигателя, реле КТ разомкнет свой контакт в цепи контактора КМ1, тот отключится и прекратит подачу постоянного тока в цепь статора. Схема вернется в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного токов в данной схеме используется типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.