

Перечислите основные блоки, из которых состоит функциональная схема электропривода с использованием микропроцессора и проанализируйте принцип ее действия
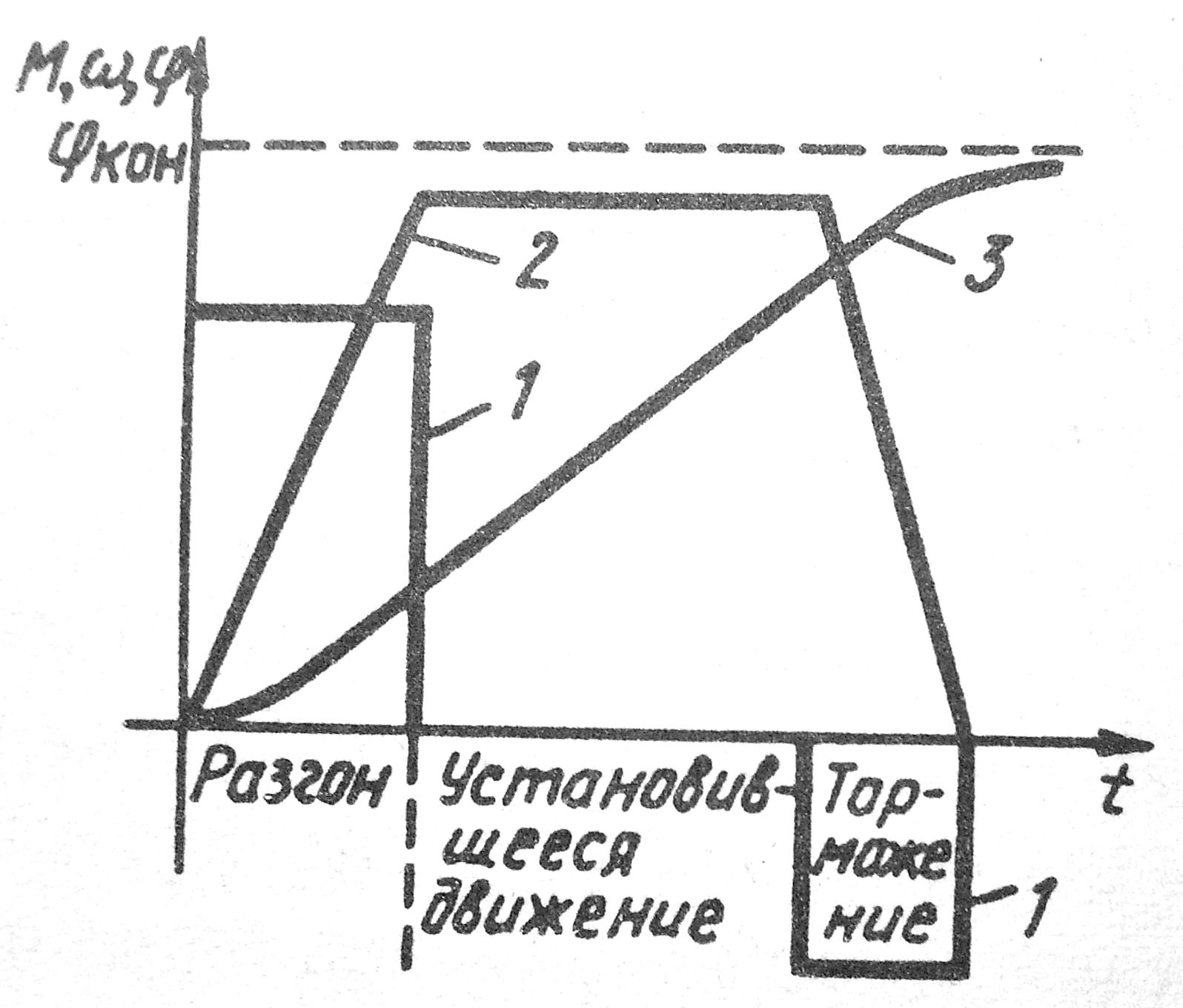
Рассмотрим схему ЭП с ДПТ для регулирования положения исполнительного органа робототехнического устройства с использованием микропроцессорного управления (рисунок а). Этот ЭП должен обеспечивать перемещение и точное позиционирование ИО робота в соответствии с диаграммой, приведенной на рисунке в, для чего в нем используется обратная связь по положению. Для обеспечения высокой точности позиционирования в ЭП осуществляется также регулирование тока (момента) и скорости ДПТ. в)
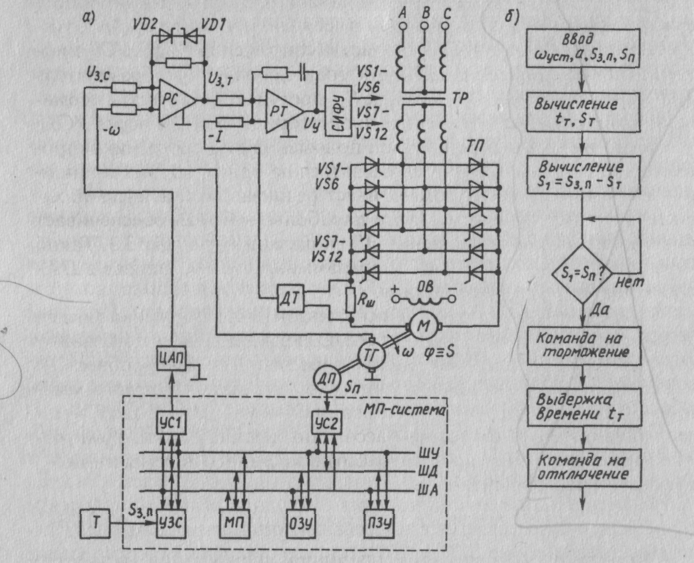
Силовая часть ЭП включает в себя трехфазный мостовой реверсивный тиристорный преобразователь ТП, питаемый от трансформатора ТV. Схема управления построена по принципу подчиненного регулирования координат.
Аналоговый П-регулятор скорости РС формирует сигнал задания тока Uзт на основе своего задающего сигнала Uзс, поступающего на него с внешнего контура положения, и сигнала обратной связи по скорости Uос, вырабатываемого тахогенератором BR. Стабилитроны VD1 и VD2 ограничивают сигнал на выходе PC, т.е. обеспечивают ограничение тока и момента двигателя.
Регулирование тока производится аналоговым ПИ-регулятором тока РТ, на вход которого поступают сигнал обратной связи по току Uот от датчика тока ДТ и сигнал задания тока Uзт, с выхода РС.
Регулирование положения осуществляется с помощью микропроцессорной системы, включающей в себя микропроцессор МП, устройства памяти ОЗУ и ПЗУ, устройства сопряжения УС1... УСЗ, цифровой датчик положения ДП и цифроаналоговый преобразователь ЦАП. Сигнал задания положения Sзп задается с терминала Т, подключаемого к МП-системе через УСЗ. Такая цифроаналоговая схема существенно улучшает характеристики ЭП.
Принцип работы РП основывается на вычислении момента начала торможения ЭП, что позволяет получить показанные на рисунке в кривые движения.
При известных значениях установившейся скорости ωуст и ускорении
ε = (М - Мс)/J, где J - момент инерции ЭП, могут быть рассчитаны время tт и путь Sт на участке торможения ЭП в конце отработки заданного перемещения Sзп по следующим формулам
![]() ,
,
![]() .
.
Алгоритм работы МП-системы при выработке сигнала на торможение приведен на рис.в. Для его реализации в МП-систему вводятся данные по величинам: ωуст, ε, Sзп и сигнал датчика положения Sп, пропорциональный текущему положению вала двигателя и ИО. МП-система производит вычисление по величин tт и Sт и разности S1 = Sзп – Sт. Затем сопоставляется значение разности S1 с сигналом датчика положения Sп. Как только S1 станет равной Sп, от МП-системы выдается команда на торможение ЭП, начинается отсчет выдержки времени tт и по истечении этого времени выработается команда на его отключение.