

Равноме́рное
движе́ние — механическое
движение,
при котором тело за любые равные отрезки
времени проходит равные перемещения.
Равномерное движение материальной
точки —
это движение, при котором скорость точки
остаётся неизменной. Перемещение,
пройденное точкой за время ![]() ,
задаётся в этом случае формулой
,
задаётся в этом случае формулой ![]() .
.
Прямолинейное равномерное движение — это движение, при котором тело (точка) за любые равные и бесконечно малые промежутки времени проходит одинаковые перемещения. Вектор скорости точки остаётся неизменным, а её перемещение есть произведение вектора скорости на время:
![]() .
.
Если
направить координатную ось вдоль прямой,
по которой движется точка, то зависимость
координаты ![]() точки
от времени является линейной:
точки
от времени является линейной:
![]() ,
,
где ![]() —
начальная координата точки,
—
начальная координата точки, ![]() —
проекция вектора скорости на координатную
ось.
—
проекция вектора скорости на координатную
ось.
Точка, рассматриваемая в инерциальной системе отсчёта, находится в состоянии равномерного прямолинейного движения, если векторная сумма всех сил, приложенных к точке, равна нулю.
Равноускоренное движение — движение, при котором ненулевой вектор ускорения остаётся неизменным по модулю и направлению.
Примером
такого движения является движение тела,
брошенного под углом α к
горизонту в однородном поле силы
тяжести — тело движется с постоянным
ускорением ![]() ,
направленным вертикально вниз.
,
направленным вертикально вниз.
При равноускоренном движении по прямой скорость тела определяется формулой:
v(t) = v0 + at
Зная,
что ![]() ,
найдём формулу для определения координаты
x:
,
найдём формулу для определения координаты
x:
![]()
Примечание. Равнозамедленным можно
назвать движение, при котором модуль
скорости равномерно уменьшается со
временем (если вектора ![]() и
и ![]() противонаправлены).
Равнозамедленное движение также является
равноускоренным.
противонаправлены).
Равнозамедленное движение также является
равноускоренным.
В случае одномерного равноускоренного движения вдоль координаты x имеет место формула:
![]() ,
,
Равномерное движение по окружности
При
равномерном движении точки по окружности
её траекторией является дуга. Точка
движется с постоянной угловой
скоростью ![]() ,
а зависимость угла поворота точки от
времени является линейной:
,
а зависимость угла поворота точки от
времени является линейной:
φ = φ0 + ωt,
где ![]() —
начальное значение угла поворота. Эта
же формула определяет угол поворота абсолютно
твёрдого тела при
его равномерном вращении вокруг
неподвижной оси, то есть при вращении
с постоянной угловой скоростью
—
начальное значение угла поворота. Эта
же формула определяет угол поворота абсолютно
твёрдого тела при
его равномерном вращении вокруг
неподвижной оси, то есть при вращении
с постоянной угловой скоростью ![]() .
Важной характеристикой данного типа
движения является линейная
скорость материальной
точки
.
Важной характеристикой данного типа
движения является линейная
скорость материальной
точки ![]() Нужно
помнить, что равномерное движение по
окружности - движение равноускоренное.
Хотя модуль линейной скорости и не
меняется, но меняется направление
вектора линейной скорости (из-за нормального
ускорения)
.
Нужно
помнить, что равномерное движение по
окружности - движение равноускоренное.
Хотя модуль линейной скорости и не
меняется, но меняется направление
вектора линейной скорости (из-за нормального
ускорения)
.
Свобо́дное падéние — равноускоренное движение, под действием силы тяжести, при отсутствии сопротивления воздуха. На поверхности Земли, на уровне моря ускорение свободного падения составляет примерно 9,81 м/с².

![]()
движение тела брошенного вертикально вверх
.![]()
движение тела брошенного вертикально вниз
Центростремительное
ускорение. При
равномерном движении по окружности
значение скорости остается постоянным,
а направление вектора скорости ![]() изменяется
в процессе движения. Определим ускорение
тела, движущегося равномерно по окружности
радиусом R. За
интервал времени Δt тело
проходит путь
изменяется
в процессе движения. Определим ускорение
тела, движущегося равномерно по окружности
радиусом R. За
интервал времени Δt тело
проходит путь ![]() .
.
Этот
путь Δs равен
длине дуги АВ (рис.
17). Векторы
скоростей ![]() и
и ![]() точках А и В направлены
по касательным к окружности в этих
точках, угол α между векторами
точках А и В направлены
по касательным к окружности в этих
точках, угол α между векторами ![]() и
и ![]() равен
углу между радиусами ОА и OB.
равен
углу между радиусами ОА и OB.
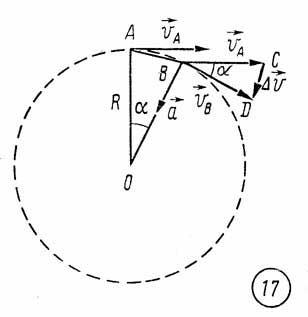
Для
нахождения вектора ускорения ![]() нужно
найти разность векторов скорости
нужно
найти разность векторов скорости ![]() и
определить отношение изменения скорости
к малому интервалу времени Δt,
за который произошло это изменение:
и
определить отношение изменения скорости
к малому интервалу времени Δt,
за который произошло это изменение:
![]() .
.
Первый закон Ньютона
-
Первый закон Ньютона гласит: существуют системы отсчёта (называемые инерциальными), в которых замкнутая система продолжает оставаться в состоянии покоя или прямолинейного равномерного движения. По сути, этот закон постулирует инертность тел. Это может казаться очевидным сейчас, но это не было очевидно на заре исследований природы. Так, например, Аристотель утверждал, что причиной всякого движения является сила, т. е. у него не было движения по инерции.
Инерциальная система отсчёта - это система отсчёта, связанная со свободным невращающимся телом. Свободное тело — тело, не взаимодействующее с другими телами.
Второй закон Ньютона
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к телу силой и ускорением этого тела. Один из трех законов Ньютона.
Второй закон Ньютона утверждает, что ускорение, которое получает тело, прямо пропорционально приложенной к телу силе и обратно пропорционально массе тела.
Этот закон записывается в виде формулы:
![]() =
= ![]()
где ![]() —
ускорение тела,
—
ускорение тела, ![]() —
сила, приложенная к телу, а m — масса
тела.
—
сила, приложенная к телу, а m — масса
тела.
Или, в более известном виде:
![]() =
= ![]()
Если
на тело действуют несколько сил, то во
втором законе Ньютона под ![]() подразумевается
равнодействующая всех сил.
подразумевается
равнодействующая всех сил.
В случае, если масса тела меняется со временем, то второй закон Ньютона записывается в более общем виде:
![]()
где ![]() —
импульс (количество движения) тела, t —
время, а
—
импульс (количество движения) тела, t —
время, а ![]() —
производная по времени. Второй закон
Ньютона действителен только для
скоростей, много меньших скорости света
и в инерциальных системах отсчёта. →
—
производная по времени. Второй закон
Ньютона действителен только для
скоростей, много меньших скорости света
и в инерциальных системах отсчёта. →
В
данном законе как частный случай заключен
первый закон Ньютона. Это можно видеть
если ![]() =
0 (т.е. если на тело не действуют силы или
равнодействующая сил равна нулю) при
этом соответственно получаем что и
=
0 (т.е. если на тело не действуют силы или
равнодействующая сил равна нулю) при
этом соответственно получаем что и ![]() =
0, а значит, тело сохраняет состояние
покоя или равномерного прямолинейного
движения.
=
0, а значит, тело сохраняет состояние
покоя или равномерного прямолинейного
движения.
Третий закон Ньютона
-
Третий закон Ньютона объясняет, что происходит с двумя взаимодействующими телами. Возьмём для примера замкнутую систему, состоящую из двух тел. Первое тело может действовать на второе с некоторой силой F12, а второе — на первое с силой F21. Как соотносятся силы? Третий закон Ньютона утверждает: сила действия равна по модулю и противоположна по направлению силе противодействия, F21 = −F12. Подчеркнём, что эти силы приложены к разным телам, а потому вовсе не компенсируются.
Сам закон: Тела действуют друг на друга с силами, направленными вдоль одной и той же прямой, равными по модулю и противоположными по направлению.
Выводы
Из законов Ньютона сразу же следуют некоторые интересные выводы. Так, третий закон Ньютона говорит, что, как бы тела ни взаимодействовали, они не могут изменить свой суммарный импульс: возникает закон сохранения импульса. Далее, надо потребовать, чтобы потенциал взаимодействия двух тел зависел только от модуля разности координат этих тел U(|r1-r2|). Тогда возникает закон сохранения суммарной механической энергии взаимодействующих тел:
![]()
Законы Ньютона являются основными законами механики. Из них могут быть выведены все остальные законы механики.
закон всемирного тяготения
В рамках классической механики гравитационное взаимодействие описывается законом всемирного тяготения. Этот закон был открыт Ньютоном в 1666 г.. Он гласит, что сила гравитационного притяжения между двумя материальными точками массы m1 и m2, разделёнными расстоянием R, пропорциональна обеим массам и обратно пропорциональна квадрату расстояния между ними — то есть:
![]()
Здесь G — гравитационная
постоянная,
равная ![]() м³/(кг
с²).
м³/(кг
с²).
Ускоре́ние свобо́дного паде́ния g (обычно произносится как «Жэ»), — ускорение, придаваемое телу в вакууме силой тяжести, то есть геометрической суммой гравитационного притяжения планеты (или другого астрономического тела) иинерциальных сил, вызванных её вращением. В соответствии со вторым законом Ньютона, ускорение свободного падения равно силе тяжести, воздействующей на объект единичной массы.
Значение ускорения свободного падения для Земли обычно принимают равным 9,8 или 10 м/с². Стандартное («нормальное») значение, принятое при построении систем единиц, g = 9,80665 м/с²[источник не указан 267 дней], а в технических расчетах обычно принимают g = 9,81 м/с².
Значение g было определено как «среднее» в каком-то смысле ускорение свободного падения на Земле, примерно равно ускорению свободного падения на широте 45,5° на уровне моря.
Реальное ускорение свободного падения на поверхности Земли зависит от широты, времени суток и других факторов. Оно варьируется от 9,780 м/с² на экваторе до 9,832 м/с² на полюсах[1]. Оно может быть вычислено (в м/с²) по эмпирической формуле:
![]() ,
,
где ϕ — широта рассматриваемого места, h — высота над уровнем моря в метрах.[2]
Этим
экспериментом был подтверждён закон
Ньютона и определён коэффициент G =
6,67.10-11 H
в формуле Ньютона ![]() .
.
До этого момента всё было известно, кроме массы Земли.
Как рассчитали массу Земли?
Взяли
две формулы ![]() и
и ![]() .
.
Не долго думая, предположили, что сила F в этих формулах одна и та же и приравняли их друг к другу.
Из
двух формул получилась одна формула ![]() .
.
По
этой формуле и вычислили массу Земли.
Она оказалась ![]() .
.
Однако давайте разберёмся, а так ли оно на самом деле и не ошибочен ли этот расчёт?
1.
Сила притяжения в формуле ![]() не
известна, так как не известна масса
Земли Мз.
не
известна, так как не известна масса
Земли Мз.
А масса Земли Мз по этой формуле представлена точкой и не учитывает размеры Земли.
2.
Сила, вызывающая ускорение свободного
падения ![]() ,
учитывает размеры Земли, которая реально
не является точкой. Она экспериментально
определена g = 9,81 м/с2.
,
учитывает размеры Земли, которая реально
не является точкой. Она экспериментально
определена g = 9,81 м/с2.
Деформа́ция (от лат. deformatio — «искажение») — изменение взаимного положения частиц тела, связанное с их перемещением относительно друг друга. Деформация представляет собой результат изменения межатомных расстояний и перегруппировки блоков атомов. Обычно деформация сопровождается изменением величин межатомных сил, мерой которого является упругое механическое напряжение.
Деформации разделяют на обратимые (упругие) и необратимые (пластические, ползучести). Упругие деформации исчезают после окончания действия приложенных сил, а необратимые — остаются. В основе упругих деформаций лежат обратимые смещения атомов металлов от положения равновесия(другими словами, атомы не выходят за пределы межатомных связей); в основе необратимых — необратимые перемещения атомов на значительные расстояния от исходных положений равновесия(т.е. выход за рамки межатомных связей, после снятия нагрузки переориентация в новое равновесное положение).
Зако́н Гу́ка — уравнение теории упругости, связывающее напряжение и деформацию упругой среды. Открыт в 1660 году английским учёным Робертом Гуком (Хуком) (англ. Robert Hooke). Поскольку закон Гука записывается для малых напряжений и деформаций, он имеет вид простой пропорциональности.
Для тонкого растяжимого стержня закон Гука имеет вид:
![]()
Здесь F — сила натяжения стержня, Δl — абсолютное удлинение (сжатие) стержня, а k называется коэффициентом упругости (или жёсткости).
Коэффициент упругости зависит как от свойств материала, так и от размеров стержня. Можно выделить зависимость от размеров стержня (площади поперечного сечения S и длины L) явно, записав коэффициент упругости как
Энергию деформированного упругого тела также называют энергией положения или потенциальной энергией (ее называют чаще упругой энергией), так как она зависит от взаимного положения частей тела, например витков пружины.
Значит, среднее значение силы равно Fср=kl. Можно показать, что для вычисления работы А изменяющейся силы упругости нужно это среднее значение силы умножить на перемещение точки приложения силы:
A=1/2 kl•l=1/2kl2.
Трение – один из видов взаимодействия тел. Оно возникает при соприкосновении двух тел. Трение, как и все другие виды взаимодействия, подчиняется третьему закону Ньютона: если на одно из тел действует сила трения, то такая же по модулю, но направленная в противоположную сторону сила действует и на второе тело.
Сила
трения покоя (υ = 0). ![]()
Силы
трения при скольжении (υ ≠ 0). ![]() –
сила реакции опоры,
–
сила реакции опоры, ![]() –
вес тела,
–
вес тела, ![]() .
.
|
Причины трения
ШЕРОХОВАТОСТЬ ПОВЕРХНОСТЕЙ ТЕЛ. |
|
|
ВЗАИМНОЕ ПРИТЯЖЕНИЕ МОЛЕКУЛ СОПРИКАСАЮЩИхСЯ ТЕЛ. |
Найдем время t, нужное для остановки, и расстояние l, которое транспортное средство пройдет за это время.
Под
действием силы трения Fтр транспортное
средство будет двигаться с ускорением 
Выберем
координатную ось Х так, чтобы ее
положительное направление совпадало
с направлением скорости движения
транспортное средства. Сила трения Fтр и
вызванное ею ускорение а направлены
в сторону, противоположную оси Х,
поэтому проекции этих векторов на
ось Х отрицательны
и равны взятым с противоположным знаком
модулям самих векторов. Значит, модуль
ускорения  .
.
Но  ,
где Uх и U0х –
проекции векторов конечной и начальной
,
где Uх и U0х –
проекции векторов конечной и начальной
скоростей.
Обе они положительны, т. е.Uх=U, U0х=U0.
Отсюда  .
.