

2.5. Системы автоматического управления на основе цифровых средств обработки информации (цсои)
Наряду с АСУТП, в которых функции контроля и управления выполняют частично оператор, а частично вычислительный комплекс, в настоящее время существуют автоматические системы управления с центральным органом управления в виде ЦСОИ (МПС, микроконтроллер, промышленный контроллер и т.д.).
В таких САУ все функции реализуются без участия человека:
-
сбор и обработка информации;
-
контроль состояния объекта;
-
стабилизация параметров объекта в заданных пределах;
-
логико-программное управление.
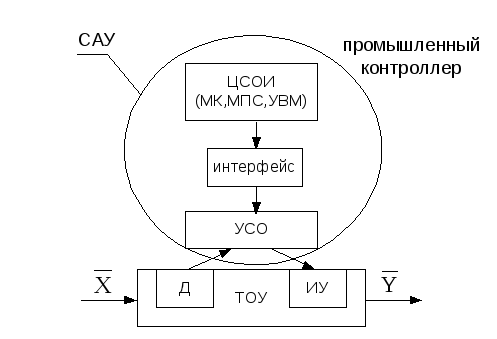
Рис.2.5.1. Обобщённая структура САУ
Она применима в том случае, если объект 1) автономный и 2) с хорошо изученными процессами. Характерной особенностью таких систем является наличие адекватного математического описания объектов, наличие апробированных алгоритмов и программ управления, приемлемые требования к надёжности аппаратных ресурсов, отсутствие оператора, а обслуживание персоналом заключается только в устранении неполадок и неисправностей.
Следует отметить, что ЦСОИ дают возможность реализовать не только вышеуказанные функции, но и решать более сложные задачи, такие как каскадное регулирование, взаимосвязанное регулирование, адаптивное и оптимальное управление.
Если объект управления состоит из ряда технических агрегатов, то ЦСОИ так же дают определённые возможности и позволяют управлять или создавать САУ для такого класса объектов.
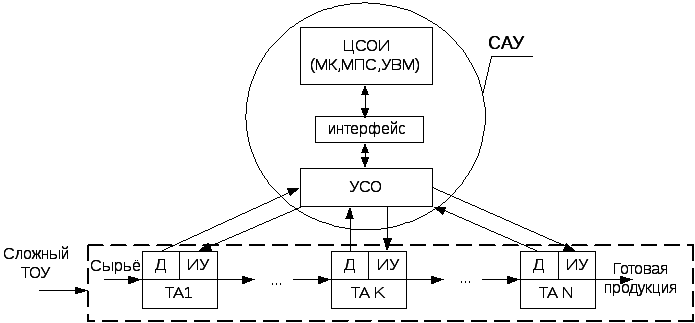
Рис. 2.5.2. Структурная схема централизованной САУ с ЦСОИ.
Такого рода САУ кроме перечисленных ранее функций могут выполнять дополнительно такие функции, как:
-
Координация работы отдельных технических агрегатов с целью согласования (синхронизации) их производительности.
-
Оптимизация работы всего технологического оборудования.
Для реализации такой САУ необходимы:
-
Высокая надёжность аппаратных средств.
-
Высокое быстродействие ЦСОИ, т.к. необходимо реализовать целый комплекс задач по управлению отдельными агрегатами и объектов в целом за ограниченный интервал времени.
Выход из строя какого – либо элемента ЦСОИ приводит к потере управления над ТОУ. В связи с этим такого рода САУ мало распространены. В качестве альтернативы рассмотрим вариант, так называемой, децентрализованной САУ (ДСАУ):
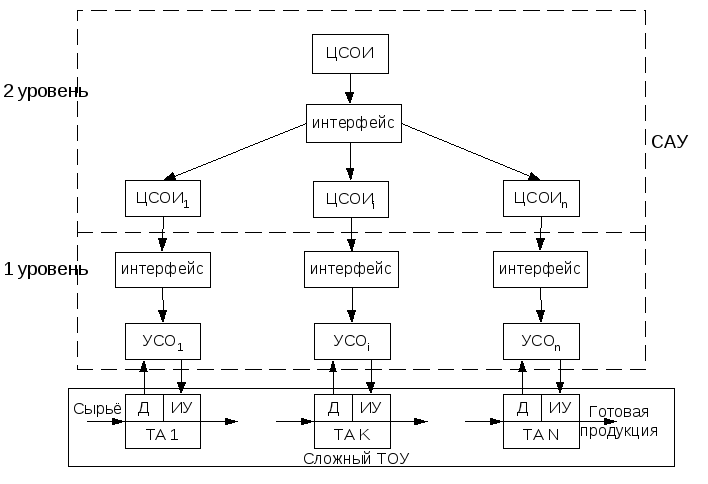
Рис. 2.5.3. Обобщённая схема ДСАУ.
Данный вариант ДСАУ предъявляет менее высокие требования к надёжности и быстродействию аппаратных средств. При этом ЦСОИ САУ нижнего уровня реализует следующий набор функций:
-
сбор и первичная обработка информации.
-
контроль состояния объекта.
-
стабилизация параметров соответствующего технического агрегата.
-
логико-программное управление при пусках и остановках соответствующего технического агрегата.
А ЦСОИ верхнего уровня обеспечивает скоординированность работы отдельных технических агрегатов и систем управления ими, о также оптимизацию режимов работы объекта в целом. В таком варианте выход из строя ЦСОИ верхнего уровня не приводит к прекращению работы в целом, но может быть снижена его производительность. При этом обычно более высока стоимость аппаратных средств всей САУ.
В том случае, если объект был создан ранее, и использовались аналоговые средства для управления отдельными технологическими аппаратами, то ДСАУ, позволяющую скоординировать работу отдельных агрегатов и оптимизировать работу в целом, можно реализовать в соответствии с представленной структурой (рис.2.5.4).
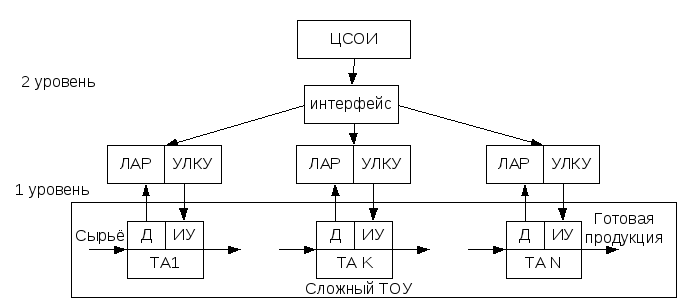
Рис. 2.5.4. Обобщённая схема ДСАУ с использованием ЛАР на нижнем уровне.