

Классификация аиус
Современные АИУС очень разнообразны и в связи с этим классифицируются по различным признакам. Наиболее распространённые признаки следующие:
-
По характеру объекта управления.
-
По уровню системы управления в общей иерархии.
-
По степени функциональной сложности.
-
По информационной мощности системы управления.
-
По способу разделения функции контроля и управления между оператором и ЭВМ (ЦСОИ).
-
Разновидности аиус по характеру объекта управления (оу)
На нижнем уровне СУ для технических и технологических объектов используется такая разновидность АИУС как АСУТП. Именно эта разновидность систем предназначена для реализации всевозможных специфических задач управления, как объектами с непрерывным характером процессов, так и с дискретным характером процессов управления. Кроме того, имеет место непрерывно – дискретный характер управления.
2.4.1.1. Объекты с непрерывным характером процесса
Такие объекты наиболее распространены в химической, нефтехимической, энергетической отраслях народного хозяйства. Пример такого объекта приведён на рис. 2.4.1.1.
1.Объекты с непрерывным характером процесса характеризуются непрерывностью входных и выходных, материальных или энергетических потоков объекта управления, а так же непрерывностью параметров, определяющих состояния объекта управления
(рис. 2.4.1.2, рис. 2.4.1.3).
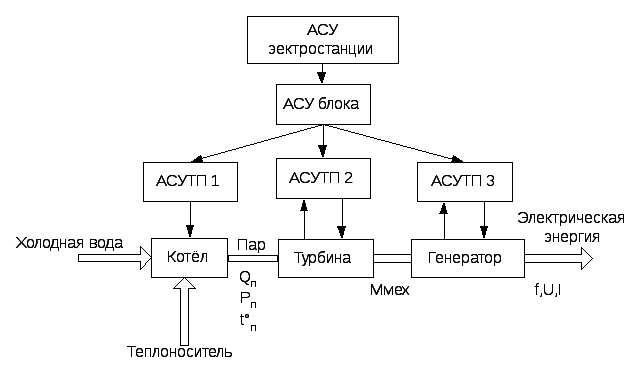
Рис.2.4.1.1.Система управления объектом с непрерывным характером процесса
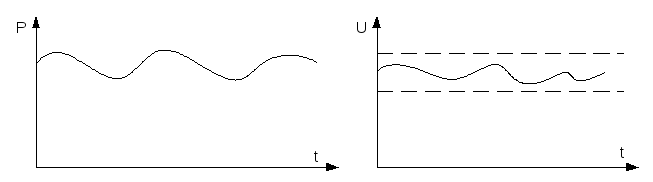
Рис.2.4.1.2. График зависимости давления Рис.2.4.1.3.График зависимости
пара от времени. напряжения от времени.
2. Для АСУТП таких объектов сбор информации о состоянии объекта обычно реализуется с помощью датчиков аналогового типа или частично с помощью датчиков дискретного типа.
3. Алгоритмы управления объектом управления с непрерывным характером процесса базируются на непрерывных математических моделях (ДУ, ИУ и др.). В частности:
3.1. Алгоритм стабилизации параметров по различным законам.
3.2.Алгоритм оптимизации режимов объекта с использованием непрерывной
математической модели.
4. Сформированные управляющие воздействия передаются обычно
-
на исполнительное устройство аналогового типа;
-
на исполнительное устройство дискретного типа.
2.4.1.2. Объекты управления с дискретным характером процесса
Они наиболее распространены в приборостроительной, станкостроительной отраслях и т.д.
1. Такие объекты характеризуются наличием дискретных материальных потоков (штуки, детали) (рис. 2.4.1.4), а также цикличностью операций, реализуемых на объектах (рис. 2.4.1.5).
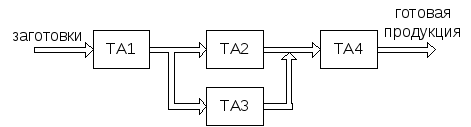
Рис.2.4.1.4. АСУ объекта в общей иерархии.
ТА1 – сверлильный станок;
ТА2,3 – фрезерные станки;
ТА4 – пресс.
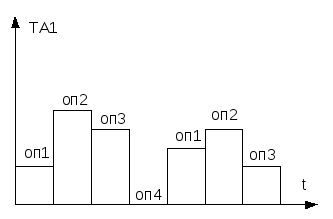
Рис.2.4.1.5. Диаграмма работы последовательности операций ТА4 (пресс).
ОП1 – установка детали в рабочую позицию;
ОП2 – прессование;
ОП3 – удаление готовой детали;
ОП4 – технологическая выдержка времени.
2. Для контроля состояния объекта управления широко используется датчики дискретного типа (счётчики, датчики состояния органов технических агрегатов).
Используются пульты рабочих мест для выявления состояния объекта с участием производственного персонала.
3. Алгоритмы базируются на таких разделах математики: алгебра логики, теория расписаний, комбинаторика, логико-программное управление и т.д. В частности, это оперативно – календарное планирование и т.д. Хотя управление частью параметров может реализовываться с помощью алгоритмов стабилизации параметров.
4. Выдача управляющих воздействий осуществляется:
-
на исполнительные устройства дискретного типа;
-
в виде кодов команд, соответствующих той или иной программе;
-
в виде указаний, распоряжений, графиков загрузки, выгрузки, передаваемых техническому персоналу.
Объекты с непрерывно-дискретным характером производства сочетают свойства и особенности первых двух рассмотренных видов объектов.
Разновидности АИУС по уровню системы управления в общей иерархии
-
АИУС 1-го уровня (АСУ ТА, ТП);
-
АИУС 2-го уровня (АСУ цеха, участка, АСУ блока эл. станции).
-
АИУС 3-го уровня (АСУП, АСУ ГРЭС…)
-
АИУС 4-го уровня (ОАСУ).
Смотри пункт 2.2.
Разновидности АИУС по информационной мощности системы управления
Разновидности АИУС по информационной мощности системы управления делят на:
-
Малая (до 40 контролируемых параметров);
-
Средняя (до 500 контролируемых параметров);
-
Большая (более 2000 контролируемых параметров).
-
Разновидности АИУС по функциональной сложности
Определяется наиболее сложной управляющей функцией, которую способна реализовать система (см. п.2.3.). Наиболее просты АИУС – реализующие многоконтурное автоматическое регулирование, более сложные – каскадное регулирование, самые сложные – оптимальное управление с адаптацией.
2.4.5. Разновидности АИУС по способу разделения функций контроля и управления между оператором и аппаратурой (ЦСОИ)
По этому признаку выделяют следующие АСУТП:
-
АСУТП без ЦСОИ.
2. АСУТП с ЦСОИ, выполняющими информационные функции.
3. АСУТП с ЦСОИ, выполняющими управляющие функции в режиме советчика.
4. АСУТП с ЦСОИ, выполняющими супервизорное управление.
5. АСУТП с ЦСОИ, выполняющими непосредственное управление.
.4.5.1. АСУТП без ЦСОИ
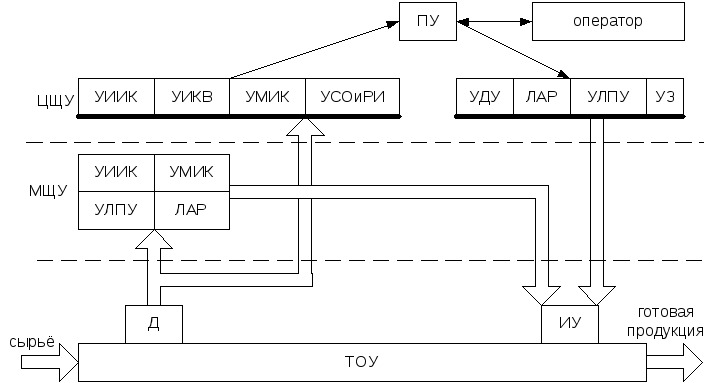
Рис.2.4.5.1.1. Структурная схема АСУТП без ЦСОИ.
Обозначения:
УИИК – устройство индивидуального измерения и контроля.
УИКВ – устройство измерения и контроля по вызову.
УМИК – устройство массового измерения и контроля.
УСОиРИ – устройство сигнализации, отображения и регистрации информации.
ЦЩУ – центральный щит управления.
МЩУ – местный щит управления.
ПУ – пульт управления.
УДУ – устройство дистанционного управления.
УЛПУ – устройство логико-программного управления.
УЗ – устройство защиты.
Такие человеко-машинные системы в настоящее время используются для управления
автономными, сравнительно простыми объектами с хорошо изученными процессами (т.е. есть ММО – простая и детерминированная).
Такая система реализует обычно следующий набор функций:
-
Сбор информации о состоянии объекта (аппаратура).
-
Контроль нахождения параметров объекта в регламентных пределах (оператор).
-
Сигнализация, отображение и регистрация информации об объекте (аппаратура).
-
Регулирование параметров объекта в заданных пределах или по заданному графику (аппаратура).
-
Программное управление пусками и остановками объекта (оператор, УЛПУ).
-
Выявление предаварийных и аварийных ситуаций на объекте и принятие мер по их устранению (аппаратура, оператор).
УИИК позволяет измерять и контролировать наиболее важные технологические параметры, которые существенно влияют на состояние объекта и на результаты его функционирования.
УИВК обычно применяется для измерения, контроля и наблюдения за менее важными параметрами. Они реализуются обычно с использованием одного показывающего прибора и группы датчиков, которые подключаются к нему через коммутирующее устройство.
УМИК используется в тех случаях, когда надо измерять, наблюдать большое количество однотипных вспомогательных параметров, значения которых во времени изменяются медленно.
Для реализации УМИК, применяются автоматические многоканальные измерительные системы, снабжённые коммутирующими устройствами, связанные с системой световой сигнализации.
УСОиРИ. Его назначение обычно состоит в том, чтобы в момент выхода параметра за допустимые пределы, оператору в наглядной форме предоставлялась информация об этом факте.
УД предназначены для передачи команд от оператора на исполнительные устройства или на задатчики ЛАР.
ЛАР это обычно серийно выпускаемые устройства – локальные регуляторы, которые обеспечивают возможность либо поддерживание параметра в заданных пределах, либо изменение параметра по заданному закону.
УЛПУ реализует логическую последовательность действий по переводу объекта из одного состояния в другое.
УЗ предназначены для выявления ненормальных ситуаций на объекте, и для защиты его от повреждений и разрушений.
Для обеспечения надёжности рекомендуется, чтобы данные для решающей части устройств зашиты и исполнительные устройства, на которые действуют устройства защиты, были автономными и имели автономные источники питания.
Набор описанных устройств позволяет оператору контролировать состояние объекта и в случае необходимости через пульт управления и устройства дистанционного управление оказать воздействие на объект. Таким образом, эти устройства разгружают оператора от утомительной работы по контролю всех параметров объекта и по управлению всеми параметрами, что даёт ему возможность сосредоточиться на контроле наиболее важных параметров и даёт время на принятие правильных решений в нештатных ситуациях.
Такие системы, хотя и не содержат в своём составе цифровых вычислительных средств, тем не менее являются человеко-машинными системами, которые позволяют с достаточно высокой степенью надёжности и небольшими затратами управлять большой группой технических объектов.