

-
Проведение эксперимента. (этап 1)
Эксперимент,
организованный в соответствии со схемой
(рис.3.3.1) даёт возможность зарегистрировать
и запомнить значения величины X
и Y
в различные моменты времени
![]()
-
ti
X(ti)
Y(ti)
t -N
X(t -N)
Y(t –N)
···
···
···
t0
X(t0)
Y(t0)
···
···
···
ti-1
X(ti-1)
Y(ti-1)
ti
X(ti)
Y(ti)
···
···
···
t N
X(t M)
Y(t M)

Рис.3.3.1. Решетчатая функция.
Вместо непрерывной функции X(t) имеет место ряд значений Х в различные моменты времени:
![]()
упростим запись:
![]() ,
,
![]() - текущий номер такта решётчатой функции,
∆t – интервал квантования по времени
или период дискретизации.
- текущий номер такта решётчатой функции,
∆t – интервал квантования по времени
или период дискретизации.
В результате такого эксперимента получаем набор статистических данных, которые позволяют в дальнейшем строить ММ объекта экспериментальным методом.
-
Выбор модели. (этап 2)
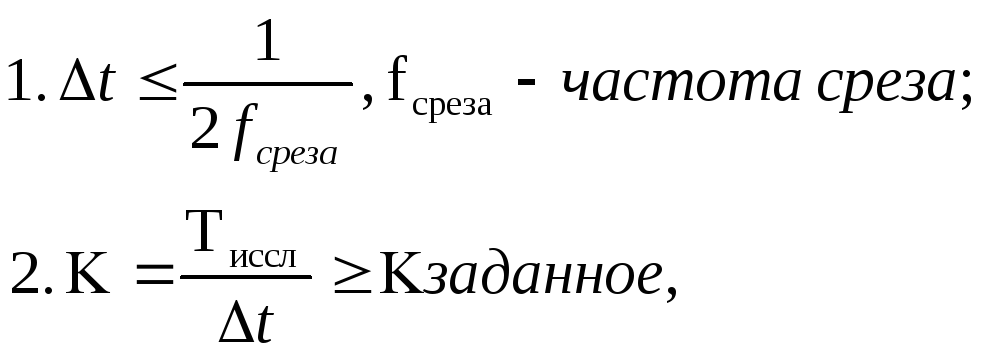
При проведении эксперимента с использованием описанных выше указанных аппаратных средств, непрерывные функции X и Y трансформируются в так называемые решётчатые функции (см. рис. 3.3.1), следовательно, для описания моделей объекта нельзя использовать дифференциальные уравнения, так как они предполагают непрерывность функции. При переходе от непрерывной функции к решетчатой происходит потеря части информации об объекте, но использовать решетчатые функции и разностные уравнения в качестве ММ объекта можно, если следующие условия:
т. е. количество
параметров должно быть достаточно
большим. В связи с этим были предложены
модели в виде разностных уравнений,
которые могут базироваться на решётчатых
функциях. Разностное уравнение 1-го
порядка имеет вид:
![]() и являются аналогом ДУ:
и являются аналогом ДУ:
![]()
Действительно, вспомним, что:
![]() -
это и есть
разность 1-го порядка,
-
это и есть
разность 1-го порядка,
где
![]() ,
,
![]() –
период дискретизации, одинаковый во
всем диапазоне исследования.
–
период дискретизации, одинаковый во
всем диапазоне исследования.
В вышеприведённой
формуле мы предположили, что
![]() (Метод Калмана).
(Метод Калмана).
Пример: дифференциальное уравнение 1-го порядка приемлемое для непрерывной функции:
![]()
Разностное уравнение
получается путём подстановки вместо
дифференциала![]()
![]() (разности 1-го порядка).
(разности 1-го порядка).
![]()
C(Yi-Yi-1)+KiYi-1=K2Xi-1, C – константа.

Аналогично можно
показать соответствие ДУ 2-го порядка
и РУ 2-го порядка и т. д. РУ N-го
прядка имеет вид
![]() .
.
-
Группировка данных. (этап 3)
На этом этапе
формируются данные в соответствии со
следующей таблицей удобной для определения
соответствующих
![]() ,
,
![]() -
расчетные значения выходных координат
в
-
расчетные значения выходных координат
в
![]() -ый
момент времени,
-ый
момент времени,
![]() - экспериментальные
данные.
- экспериментальные
данные.
|
Экспериментальные данные |
Расчётные формулы |
|
Y0,X0,Y1 |
|
|
Y1,X1,Y2 |
|
|
……. |
…… |
|
Yi-1,Xi-1,Yi |
|
|
…… |
..….. |
|
Ym-1,Xm-1,Ym |
|
Из таблицы видно,
что по формулам и экспериментальным
данным для каждого момента времени ti
можно определить
![]() ,
но для этого нужно знать значения A0
и B0.
,
но для этого нужно знать значения A0
и B0.