

4.6.4. Алгоритм симплексного метода
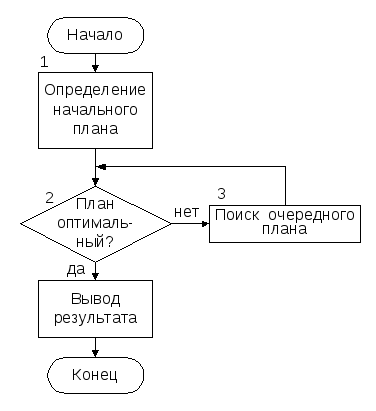
Рис.4.6.4.1. Алгоритм симплексного метода.
Качественно суть симплексного метода заключается в том, что очередной план берется соответствующей той или иной вершине ОДР и после этого план проверяется на оптимальность. Если результат положительный, т.е. план - оптимален, то значение координат этой вершины является искомым решением, если нет — то осуществляется переход к следующему плану, т.е. к следующей вершине. Причем переход от одного допустимого плана к другому осуществляется так, что ЦФ последовательно уменьшается.
1 этап. Выбор начального плана:
-
Произвольно выбираются свободные переменные СП k: X1, X2, …,Xk, и тогда Xk+1…Xn – базисные переменные.
-
Выражается целевая функция W=f11(X1…Xk) через свободные переменные.
-
Выражаются базисные переменные через свободные переменные БП=f21(СП1) или БП=f21(Х1…Хk).
-
Полагаются: СП1=0 (X1=0,…Xk=0).
-
Поскольку определена зависимость БП=f21(СП1) и W=f11(СП1), то определяются конкретные значения W1 и БП1 для начального плана.
2 этап. Оценка оптимального плана осуществляется на основе выражения:
![]() +св.член
или +const
(1)
+св.член
или +const
(1)
Для оценки плана на оптимальность необходимо проанализировать знаки всех коэффициентов уравнения (1), и если все знаки положительны, то этот план является оптимальным.
3 этап. Выбор очередного плана
-
Выбирается новый i-ый набор свободных и базисных переменных, который не совпадает с предыдущими наборами (планами)(путем замены 1-ой СП на соответственно 1 БП)
-
Выражается Wi=f1i(СПi).
-
Выражаются БПi=f2i(СПi).
-
Полагаются СПi=0.
-
Определяются конкретные значения базисных переменных и краевой функции для i-ого плана БПi и Wi.
-
Осуществляется переход на блок 2.
Рассмотрим реализацию симплекс-метода на примере.
4.6.5 Пример поиска оптимального плана
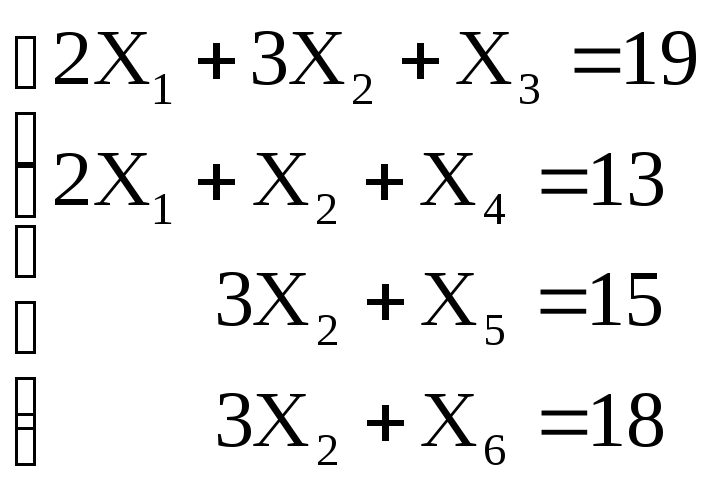
Исходная постановка задачи линейного программирования.
Дано:
1.
![]() ;
;
2.
 ;
;
3.
![]() ;
;
n=6, m=4, k=2.
Формулировка задачи:
Необходимо найти такие положительные значения X3,…,X6, которые удовлетворяют системе ограничений (2) и обращают в минимум критерий эффективности.
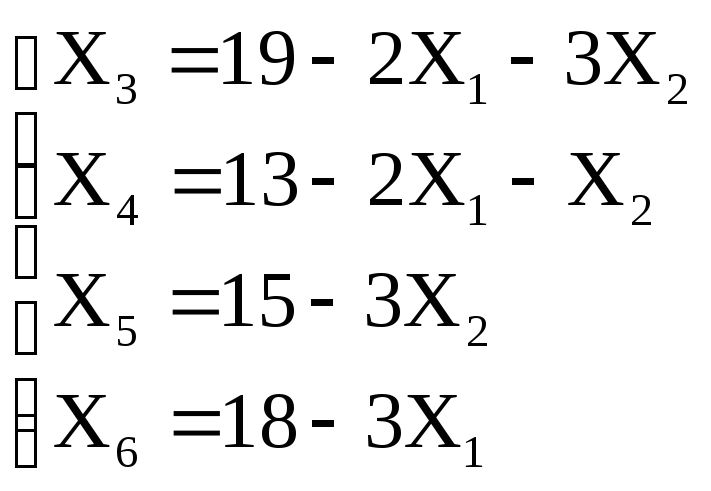
Первый план
Выбираем
![]() тогда
X3,X4,X5,X6
БП
выбрав СП, БП, выразим критерий
эффективности и ограничения, (W
и БП) через СП:
тогда
X3,X4,X5,X6
БП
выбрав СП, БП, выразим критерий
эффективности и ограничения, (W
и БП) через СП:
1. W(1)= –7X1–5X2=0.
2.
 .
.
3. Х1≥0,…,Х6≥0.
Полагаем выбранные СП равными 0 и определяем БП и W:
X1=X2=0, X3=19, X4=13, X5=15, X6=18, W(1)=0.
Поскольку в уравнении W(1)=f(СП) есть отрицательные знаки коэффициентов, то первый план не оптимален. Следовательно, переходим к новому набору СП. Если проанализировать вид целевой функции, то убедимся в том, что, увеличивая X1 и X2 можно достичь меньших значений критерий эффективности. Если, например, увеличивать одну из свободных переменных, например, X2, то, анализируя уравнения для базисных переменных БП=f(СП) (2), можно убедиться в том, что X2 можно увеличивать до определенного предела, а именно до тех пор, пока хотя бы одна из БП не станет отрицательной. В данном случае наиболее быстро приближается к опасной зоне, т.е. к зоне отрицательных значений, при возрастании Х2, базисная переменная БП Х5, следовательно, производим замену: из БП убираем Х2 и на её место включаем Х5.
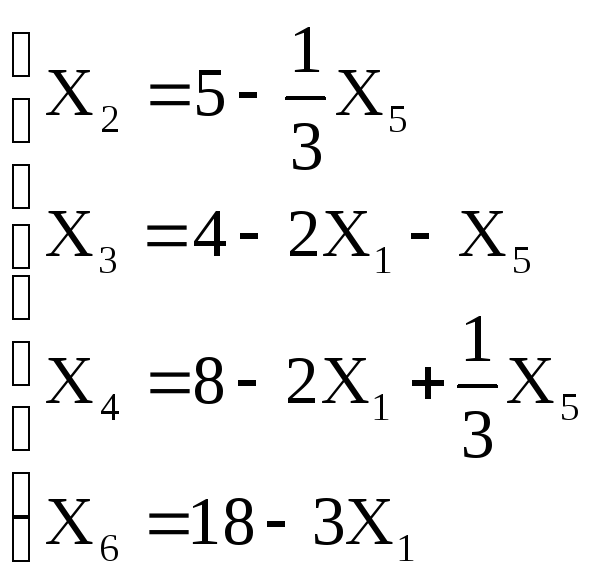
Второй план:
Х1, Х5 → СП; Х2, Х3, Х4, Х6→БП, выражаем W и БП через СП.
1) W(2)=
–25–7 X1+![]() X5.
X5.
2) .
.
3) Х1≥0,…,Х6≥0.
Полагаем Х1=0, Х5=0, и определяем W(2) и БП2 , и получаем для 2-го плана:
X1=X5=0, X3=4, X4=8, X2=5, x6=18, W(2)= -25.
Значения W(2) стало меньше, по сравнению с 1-ым планом, но второй план также не оптимален, т.к. один из коэффициентов в уравнении W(2)=f(СП) отрицателен.
Третий план.
Проводим анализ- какая БП быстрее приближается к опасной зоне при увеличении Х1 так как знак при Х1 отрицательный. Наиболее быстро приближается к зоне отрицательного значения БП Х3.
Поэтому исключаем из СП Х1, а вводим в состав СП – Х3.
Х3, Х5 → СП; Х1, Х2, Х4, Х5 → БП, выражаем W и БП через СП:
1) W(3)=
–39+![]() Х1-
Х1-![]() Х5.
Х5.
2)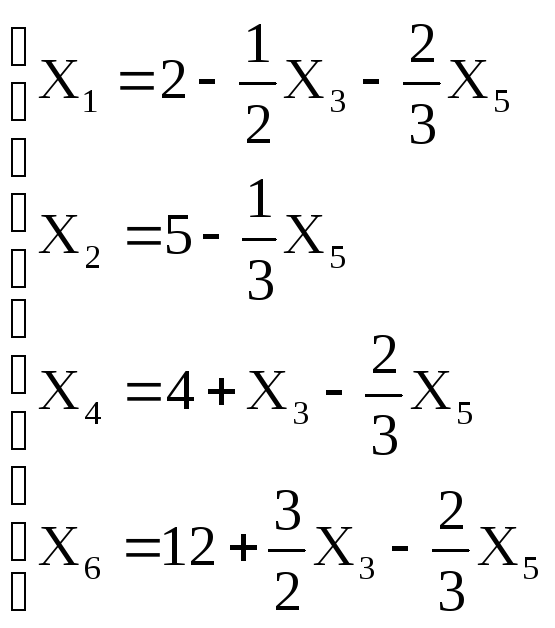 .
.
Полагаем Х3=Х5=0, и находим Х1=2, Х2=5, Х4=4, Х6=12; W(3)= -39; значения W(3) меньше чем W(2), но план 3 также не оптимален, т.к. в уравнении (1) W(3)= -39+(7/2)Х3 - (11/6)Х5
есть отрицательные коэффициенты.
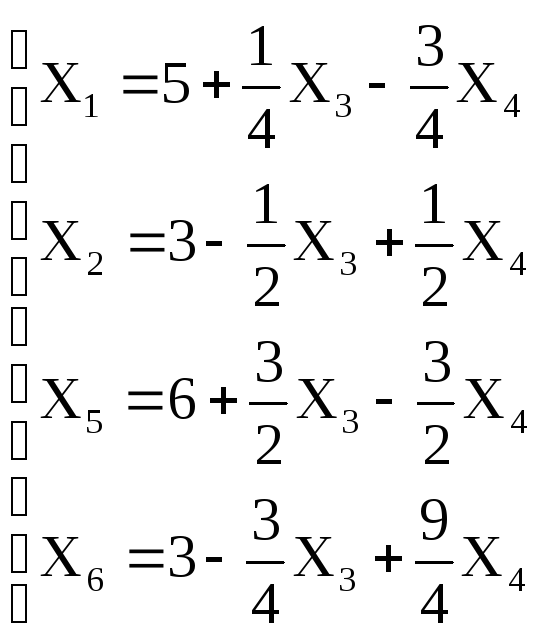
Четвёртый план. Т.к отрицательный коэффициент в ЦФ W(3) при Х5 то ее выводим из состава СП, а взамен вводим Х4, как переменную, наиболее быстро приближающуюся к 0, при увеличении Х5.
Х3, Х4→СП; Х1, Х2, Х5, Х6→БП.
-
W(3)= 50 +
 Х3+
Х3+ 4.
4. -
 .
.
Х3=Х4=0, Х1=5, Х2=3, Х5=6, Х6=3; W(4)= –50; т.к. в уравнении (1) все коэффициенты положительны, то W(4)=Wmin.
Для задач линейного программирования с большим числом неизвестных и большим числом уравнений-ограничений необходимо алгоритм симплекс-метода реализовать с использованием ЭВМ, т.к. реализация алгоритма вручную весьма трудоемка.