-
39. Организация обмена данными между микроконтроллерами при работе в сети.
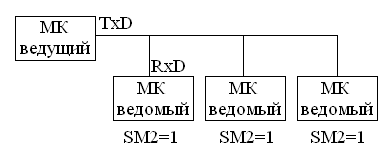
Используется широковещательный 11-битовый формат с ТВ8=1.
Пусть ведущему МК требуется передать блок данных некоторому (или нескольким) ведомому МК. С этой целью ведущий МК в протокольном режиме "широковещательной" передачи (всем ведомым МК) выдает в моноканал байт-идентификатор абонента (код адреса МК-получателя), который отличается от байтов данных только тем, что в его девятом бите содержится 1 (TB8 = 1 – широковещательный кадр). Программа реализации протокола сетевого обмена информацией должна быть построена таким образом, чтобы при получении байта-идентификатора (RB8 = 1) во всех ведомых МК произошли прерывание прикладных программ и вызов подпрограммы сравнения байта-идентификатора с кодом собственного сетевого адреса. Адресуемый МК сбрасывает свой управляющий бит SM2 и готовится к приему блока данных. Остальные ведомые МК, адрес которых не совпал с кодом байта-идентификатора, оставляют неизменным состояние SM2 = 1 и передают управление основной программе. При SM2 = 1 информационные байты, передаваемые по моноканалу и поступающие в УАПП ведомых МК, прерывания не вызывают, т.е. игнорируются. После приема сообщения адресуемый МК устанавливает свой управляющий бит SM2 в «1».
ТУТ ЧТО-ТО ЕЩЕ НУЖНО ГОВОРИТЬ?
-
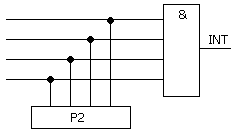
40. Схема интерфейса микроконтроллера mcs-51 с внешней памятью программ, внешней памятью данных и дополнительными портами ввода-вывода.
Интерфейс с внешней памятью программ:

PSEN – разрешение работы с памятью программ, ALE – стробирование адреса
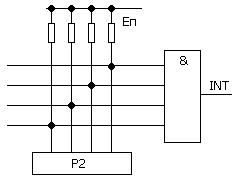
Интерфейс с внешней памятью данных и дополнительными портами ввода-вывода:
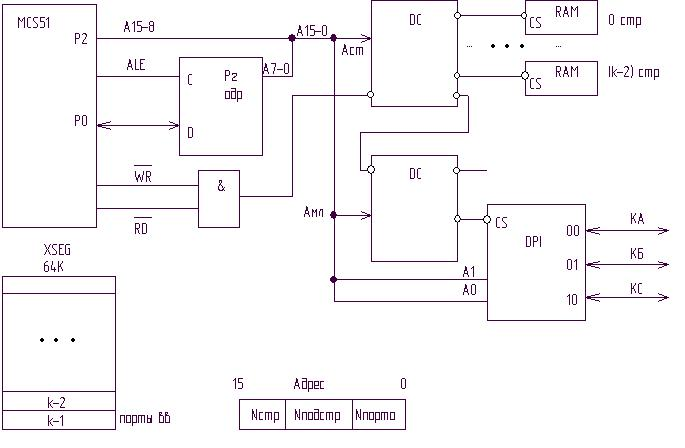
Можно применять команду movx для пересылки данных в или из адресованной ячейки (это может быть порт или память данных).
ЧТО ТУТ НУЖНО ГОВОРИТЬ?
-
41. Основные средства и способы организации взаимодействия микроконтроллера с клавиатурой и дисплеем.
Взаимодействие с клавиатурой:
1. Используя для подключения клавиатуры регистр ввода и регистр вывода.
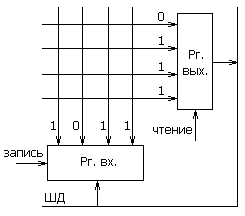
2. Используя интегральную схему программируемого параллельного интерфейса (с 3мя портами PA, PB, PC).
3. Используя встроенные порты МК для связи с клавиатурой.
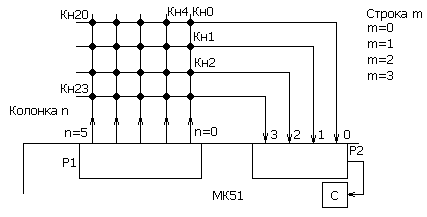
![]() ,
где l – количество колонок
в столбце
,
где l – количество колонок
в столбце
4. Используя специальный контроллер клавиатуры и дисплей.
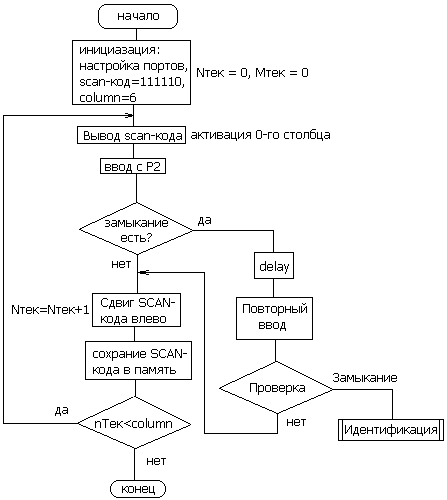
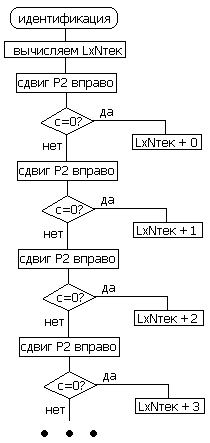
Алгоритм взаимодействия с клавиатурой.
После идентификации, имея номер кнопки, входим в таблицу
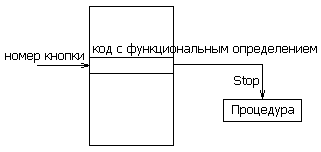
Обращение к процедуре выполняется по прерыванию
При программировании порта с При программировании порта без подтягивающих
подтягивающими резисторами резисторов
ИЛИ
Выполняются прерывания по таймеру с интервалом 50-79 мс.
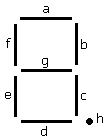
Взаимодействие с дисплеем.
Семисегментный индикатор
|
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|
h |
g |
f |
e |
d |
c |
b |
a |
Статический и динамический способы управления дисплеем.
1. Статический.
Недостаток: большое количество оборудования, которое быстро разряжается с увеличением количества HG (индикаторов).
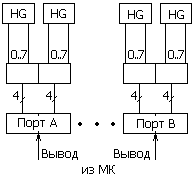
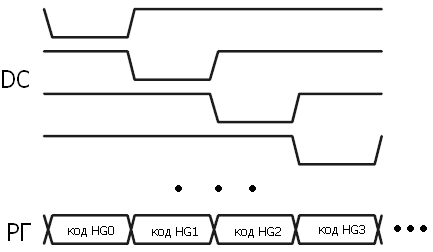
2. Динамический.
В режиме разделения времени управляются все индикаторы последовательно. Преимущество – минимальное количество портов.

Временные диаграммы работы