

Федеральное агентство по образованию
Государственное общеобразовательное учреждение
высшего профессионального образования
Институт Высокоточных Систем
им. В.П.Грязева
Машиностроительный факультет
кафедра «Ракетное вооружение»
Детали машин и основы конструирования
ПРОЕКТИРОВАНИЕ БЛОКА РУЛЕВОГО ПРИВОДА
УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ
Пояснительная записка к курсовому проекту
Выполнил: студент группы 020081/041 Астахов М.И.
Проверил: доцент Дехтяр Д. А.
ТУЛА 2011
Федеральное агентство по образованию
Государственное общеобразовательное учреждение
высшего профессионального образования
Институт Высокоточных Систем
им. В.П.Грязева
Машиностроительный факультет
кафедра «Ракетное вооружение»
Задание на курсовой проект
по дисциплине «Детали машин и основы конструирования»
Студент Астахов м.И. Группа 020081/041
Задание:
Проектирование блока рулевого привода.
Управление вектором тяги с помощью сопловой насадки.
Управляемая ракета “Бук”.
Дата выдачи задания: «___»___________2011г.
Срок защиты курсовой работы: «___»___________2011г.
Задание выдал: ___________ __Дехтяр Дмитрий Александрович
(подпись) (инициалы, фамилия руководителя)
Задание принял: ___________ Астахов Максим Игоревич
(подпись) (инициалы, фамилия студента)
Тула 2011
Содержание
Введение 4
Классификация органов управления 7
Конструктивные схемы 8
Основные требования, предъявляемые к органам управления вектором тяги 12
Расчетная часть 13
Определение момента на валу РМ 14
Расчет элементов пневматических приводов 17
Расчет размеров кинематических элементов пневматических приводов 18
Расчет силового цилиндра рулевой машинки 19
Расчет силового цилиндра штокового типа 20
Расчет тяги рулевого привода 22
Расчет узла соединения тяги с рычагом поворота
газодинамического органа управления 24
Пороховой аккумулятор давления 28
Расчет пружины редуктора 32
Подбор подшипников для вращающихся деталей 34
Расчет оси на прочность 36
Расчет соединений дозвуковой и сверхзвуковой части сопла 38
Заключение 39
Введение:
Для управления движением ЛА в соответствии с требуемой траекторией необходимо иметь возможность изменять в полете величину и направление вектора скорости, а также ориентацию осей ЛА в пространстве. С этой целью используются различные органы управления, действие которых создает необходимые для управления силы и моменты.
Управляющие усилия Ry, направленные нормально к траектории полета, служат для изменения направления полета.
Управляющие моменты Му необходимы как для управления вектором тяги, так и для поддержания требуемой угловой ориентации корпуса ЛА в пространстве, т.е. для его угловой стабилизации. Поэтому органы, создающие управляющие моменты, обычно называются органами управления и стабилизации.
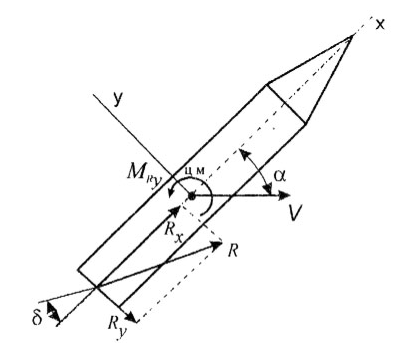
Рис.1. Cхема создания газодинамической управляющей силы.
Управление ЛА осуществляется с помощью органов управления (ОУ), построенных с использованием аэродинамических сил (аэродинамические органы управления) или энергия истекающей струи двигателя (органы управления вектором тяги).
Способ управления выбирают на начальных стадиях проектирования ЛА на основе всестороннего анализа различных схем, добиваясь наивысшей эффективности ЛА и его свойств по принятому критерию эффективности. При таком анализе учитываются назначение ЛА, его скорость и высота полета, маневренные и другие свойства ЛА, определяются величины управляющих сил и моментов, аэродинамические потери тяги, массовые и габаритные характеристики органов управления, мощности приводов и др. Управление вектором тяги по направлению применяют обычно при полетах на больших высотах в сильно разреженных слоях атмосферы и в космическом пространстве, а также в плотных слоях атмосферы при малых скоростях полета, когда неэффективно аэродинамическое управление,
В зависимости от способа отклонения газовой струи, различают два вида управления вектором тяги:
— механическое, которое обеспечивает отклонение струи за счет поворота всего сопла (качающиеся управляющие сопла), его части (разрезное и дефлектороное сопла) или введения в поток дополнительного элемента - щитка (триммера, газового руля).
— газодинамическое, при котором рабочее вещество вдувается (впрыскивается) в расширяющуюся часть сопла.
Органы управления и рулевой привод (РП) к ним являются исполнительными элементами в замкнутой автоматической системе управления вектором тяги и стабилизации ракеты.
В существующих ракетах применяются различные схемы исполнительных устройств, которые различаются принципом действия, числом каналов управления и рядом параметров, основными из которых являются следующие:
-
управляющее усилие по каналу тангажа
 (рыскания
(рыскания
 )
и управляющий момент
)
и управляющий момент
 органа управления РДТТ при их максимальном
значении. На практике чаше используют
относительное значение управляющего
усилия
органа управления РДТТ при их максимальном
значении. На практике чаше используют
относительное значение управляющего
усилия
 ,
где Р
- тяга
двигателя без органов управления;
,
где Р
- тяга
двигателя без органов управления; -
эффективность органа управления РДТТ определяется относительным значением потерь:
![]() (
(![]() - проекция
тяги двигателя с ОУ на ось ЛА);
- проекция
тяги двигателя с ОУ на ось ЛА);
- потери тяги при нулевом управляющем сигнале, т. е. при расположении ОУ в нейтральном положении:
![]() (
(![]() - тяга
двигателя с ОУ в нейтральном положении);
- тяга
двигателя с ОУ в нейтральном положении);
-
коэффициент газодинамического качества
 ;
; -
шарнирный момент
 ;
; -
момент инерции Ми и др.