

9. Диференціатори
Диференціатором називається пристрій, у якого вихідна напруга пропорційна диференціалу вхідної напруги.
Схема інвертуючого диференціатора на операційному підсилювачі наведена на рис. 9.1. Полярність сигналів на рис. 9.1 вказана для даного моменту часу.
При аналізі вважатимемо, що операційний підсилювач є ідеальним: Uвх д = 0, Iвх ОП = 0. У цьому випадку справедлива рівність:
iR = iC. (9.1)

Рис. 9.1. Інвертуючий диференціатор на операційному підсилювачі
Знайдемо струми
iC
=![]() ,
iR
= –
,
iR
= –![]() .
.
Прирівнюючи струми, знайдемо вихідну напругу
![]() , (9.2)
, (9.2)
яка пропорційна диференціалу вхідної напруги.
Для обчислення диференціала від вхідної напруги, що змінюється, необхідно спочатку виразити цю напругу як функцію часу. Розглянемо декілька прикладів.
Приклад 1. Трикутний вхідний сигнал
Епюри вхідної і вихідної напруг диференціатора подано на рис. 9.2.

Рис. 9.2. Реакція інвертуючого диференціатора на трикутний вхідний сигнал
Приклад 2. Прямокутний вхідний сигнал
Епюри вхідної і вихідної напруг диференціатора подано на рис. 9.3.

Рис. 9.3 Реакція інвертуючого диференціатора на прямокутний вхідний сигнал
Таку форму вихідний сигнал буде мати, якщо ОП близький до ідеального. У реальних схемах форма вихідного сигналу буде визначаться частотою проходження вхідних імпульсів та частотними властивостями операційних підсилювачів.
Крім того, схема рис. 9.1 має тенденцію до втрати стійкості, тому вживають заходи щодо динамічної стабілізації диференціатора.
На ОП можна виконати також інші схеми диференціаторів: підсумовуючого, диференціатор-підсилювач, різницевий та інші.
Диференціатор є активним фільтром верхніх частот з коефіцієнтом передачі, більшим одиниці.
10. Інтегратор
Інтегратором називається пристрій, у якого вихідна напруга пропорційна інтегралу за часом від вхідної напруги. Схема інвертуючого інтегратора на операційному підсилювачі наведена на рис. 8.1.
Наведений інтегратор – інвертуючий. Полярність сигналів на рис. 10.1 вказана для даного моменту часу.
При аналізі схеми вважатимемо, що операційний підсилювач є ідеальним:
Uвх д = 0, Івх ОП = 0.
У цьому випадку справедлива рівність
iR = iC.
Знайдемо ці струми
iR
=![]() ,
iC
=
,
iC
=
![]() .
.

Рис. 10.1. Інвертуючий інтегратор на операційному підсилювачі
Прирівнявши струми, одержимо
![]() =
=
![]() ,
,
![]() .
.
Інтегруючи вираз duвих, знайдемо вихідну напругу
![]() , (10.1)
, (10.1)
яка пропорційна інтегралу від вхідної напруги. Межами інтегрування у формулі (9.1) є моменти початку та кінця інтервалу часу спостереження сигналу. Для обчислення інтеграла від вхідної напруги, яка змінюється, необхідно спочатку виразити цю напругу як функцію часу. Розглянемо декілька прикладів.
Приклад 1. Ступінчастий вхідний сигнал
Епюри вхідної та вихідної напруг інвертуючого інтегратора наведено на рис. 10.2.
Запишемо вхідний сигнал як функцію часу
uвх(t)=

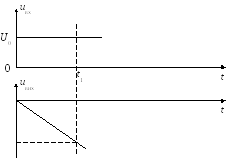
Рис.10.2. Реакція інвертуючого інтегратора на ступінчасту вхідну напругу
Знайдемо залежність вихідної напруги від часу
![]() .
(10.2)
.
(10.2)
Таким чином, вихідний сигнал прямо пропорційний часу і має полярність, протилежну полярності вхідного сигналу.
Якщо заданий інтервал спостереження (0…t1), то вихідна напруга до кінця спостереження буде рівна
![]() .
(10.3)
.
(10.3)
Приклад 2. Прямокутний вхідний сигнал
Ступінчаста форма сигналу і формули (10.2) і (10.3) дозволяють легко визначити форму вихідного сигналу, якщо на вхід поданий прямокутний сигнал. Епюри вхідної і вихідної напруг інвертуючого інтегратора подано на рис. 10.3.
Форма вихідного сигналу вийшла трикутною. Для визначення значення Uвих max необхідно за формулою (10.4) знайти значення інтеграла за півперіод (0…t1)
Uвих
max
=
![]() . (10.4)
. (10.4)
При аналізі роботи інтегратора операційний підсилювач вважався ідеальним. Реальний ОП має напругу зміщення нуля Uзм і струм зміщення Ізм. Ці величини призводять до помилок інтеграції. Для їх зменшення вводять в схему інтегратора два резистори R1 і R2, як показано на рис. 8.4.

Рис.10.3. Реакція інвертуючого інтегратора на прямокутний однополярний сигнал
У схемі рис. 9.4: R1 = R || R2 – компенсуючий опір, який зменшує вплив струму зміщення; R2 – шунтуючий опір, зменшує вплив напруги зміщення.
Інтегратор є активним фільтром нижніх частот першого порядку із спадом АЧХ (–20 дБ/дек) і з коефіцієнтом передачі у смузі пропускання, більшим одиниці. Для схеми рис. 8.4 коефіцієнт передачі рівний
K =
![]() .
.
На ОП можна виконати також схеми: суматор-інтегратор, інтегратор-підсилювач, різницевий інтегратор, подвійний інтегратор та інші.

Рис. 10.4. Корекція помилок в інтеграторі