

3. Принципы функционирования снс. [4,5,6]
В основу определения позиции ВС (любого потребителя GPS) положен принцип измерения дальностей до навигационных спутников. Высокоточное определение места ВС возможно только при условии точного определения координат спутников на момент измерения дальностей до них.
Параметры, определяющие положение спутников на орбитах (эфемериды) определяются и уточняются с помощью наземного командно-измерительного комплекса (КИК). Информация об эфемеридах всех спутников в виде так называемого “альманаха” вводится в память компьютера потребителя.
Определение дальности от спутника до потребителя осуществляется путем измерения
времени прохождения радиосигналов от спутника до потребителя (ВС). Если в аппаратуре на борту известен момент излучения радиосигнала, то дальность D до спутника может быть определена по формуле:
D = c · t,
где c - скорость распространения радиоволн;
t - время прохождения радиосигнала от спутника до ВС
Для дальностей порядка D=20000 км и скорости с = 300000 км/сек, время прохождения сигнала t = 0,06 сек. Поэтому возникает необходимость измерения весьма малых промежутков времени с очень высокой точностью.
Аппаратура спутников и бортовых приемников синхронизирована с очень высокой точностью. И на спутниках, и на борту ВС генерируются одинаковые последовательности сложных цифровых кодов. Эти коды генерируются в одни и те же моменты времени, поэтому время прохождения сигнала от спутника до ВС определяется по задержке принятого кода Δ t (рис.59).
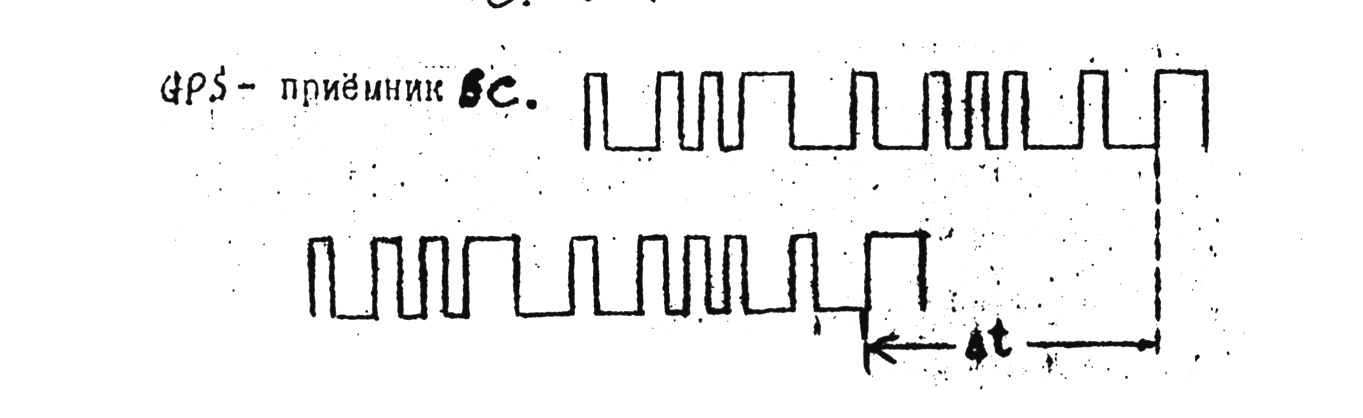
Рис. 59. Псевдослучайные коды, генерируемые в СНС
Генерируемые коды повторяются каждую микросекунду, т. е. через каждые 10-6 сек.
Для высокоточного определения места ВС необходимо чтобы точность синхронизации эталонов времени на спутниках и в бортовой аппаратуре соответствовала точности измерения времени прохождения радиосигнала от спутника до ВС.
На спутниках устанавливаются атомные эталоны (их четыре) и, кроме того, они корректируются наземными станциями управления. На борту установлены сравнительно неточные кварцевые часы. Погрешность определения момента времени Δt в бортовом приемнике определяется по специальному алгоритму в процессе вычисления. Если предположить, что время прохождения радиосигнала измеряется точно (погрешность δt = 0), то погрешностей в измерения дальностей до пеленгуемых спутников не будет, и линии положения будут пересекаться в одной токе (рис.60).
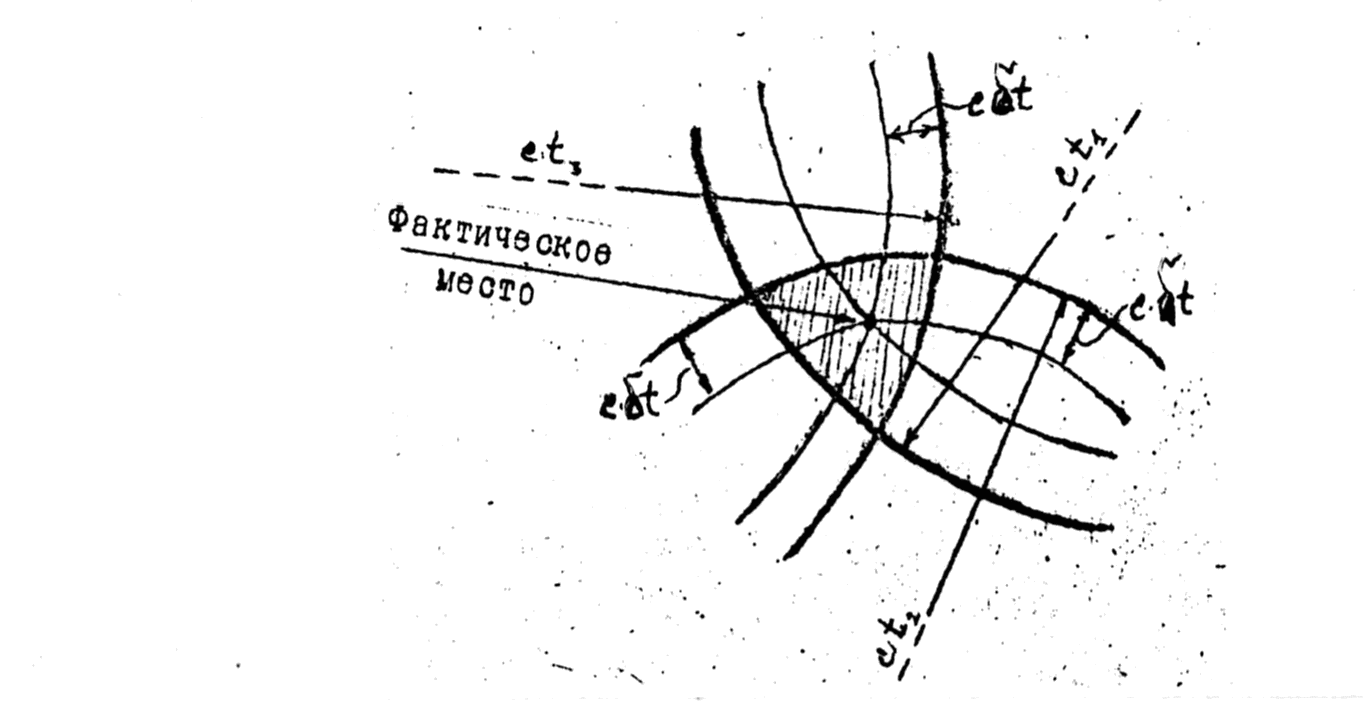
Рис. 60. Погрешность определения места ВС
В тех случаях, когда погрешность δt ≠ 0, то вычисленные линии положения будут отстоять от истинных на величину c·δt и образуют некоторую область возможного места ВС. Размеры этой области определяются величиной c·δt и углами пересечения линий положения.
Для определения положения ВС в пространстве необходимо одновременное пеленгование четырех спутников. Область возможного положения ВС будет иметь вид тетраэдра (четырехгранник, у которого все грани треугольники).
Таким образом, для высокоточного определения места ВС в реальном масштабе времени необходимо сочетание приемника (минимум четырехканального) и быстродействующего компьютера, вычисляющего погрешности бортового эталона времени δt и положение ВС в выбранной системе координат.
Влияние взаимного положения спутников на точность их пеленгования.
Возможная точность определении дальности до спутника оценивается погрешностью σд = 5…10 м. Точность определения координат ВС определяется не только этой погрешностью, но взаимным расположением спутников относительно ВС. Предположим, что два спутника и ВС расположены в одной плоскости. Обе линии положения определяются с погрешностью ΔD. Тогда область возможного положения ВС (площадь “ромба” рис.61) будет значительно меньше при угле пересечения линий положения близким к 900, чем при угле пересечения близком к 1800. Погрешность в определении места ВС за счет “геометрического фактора” может возрасти в несколько раз. При пеленговании четырех спутников погрешности ΔD также определяют область возможного нахождения ВС и точность определения координат находится в большой зависимости от взаимного расположения спутников.

Рис. 61. Определение места ВС по двум дальностям
Но если в поле зрения антенны приемника на борту находится более четырех спутников, то по определенному алгоритму можно выбрать такие спутники, взаимное расположение которых обеспечивает в данный момент наибольшую точность определения места ВС.
Для этой оценки выбран критерий DOP (геометрическое снижение точности).
Величина критерия DOP определяется из следующих соображений.
Если позиции четырех спутников и ВС рассматривать как вершины многогранника (рис.62), то, соединив их прямыми линиями, получим некоторый объем Vмнг. Чем лучше взаимное расположение спутников, тем будет больше объем Vмнг такого многогранника. Величина критерия DOP принимается обратно пропорциональной объему Vмнг с учетом некоторого коэффициента пропорциональности k:
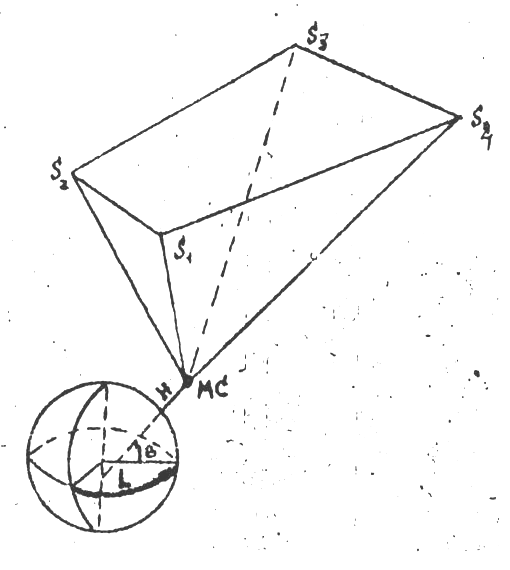
Рис. 62. К определению критерия DOP
DOP = k / Vмнг..
Величина DOP, как правило, колеблется от единицы до 10. Считается, что при DOP ≤ 4 обеспечивается высокая точность определения места ВС. Используя сведения из альманаха, бортовой компьютер непрерывно вычисляет критерий DOP, определяя лучшую четверку спутников из всего наблюдаемого количества на данный момент времени.
Средняя квадратическая радиальная погрешность определения места ВС при этом определится как:
σr = DOP · σr*,
где σr* - средняя квадратическая радиальная погрешность при DOP = 1.
За счет оптимального выбора для пеленгования четырех спутников точность определения места ВС повышается в 4…6 раз.
Точность определения координат и скорости ВС
Точность определения координат ВС (позиции антенны GPS-приемника) определяется следующими основными условиями:
- техническими характеристиками GPS при использовании С/А-кода, открытого для гражданских потребителей;
- искусственными погрешностями, введенными для гражданских потребителей в режиме S/A (ограниченного доступа);
- возможным несоответствием геодезических систем координат: WGS-84, принятой в GPS, и используемой на картах или в бортовом навигационном комплексе.
При использовании С/А-кода средние квадратические погрешности в определении позиции антенны GPS-приемника составляют:
- горизонтальных координат sг = 10-15 м;
- абсолютной высоты sн = 15-20 м.
Для оценки точности навигационных вычислений следует принимать средние квадратические погрешности в определении позиции GPS-потребителя, гарантированные Министерством обороны США, при работе в режиме ограниченного доступа:
- горизонтальных координат sг = 50 м;
- абсолютной высоты sн = 70-80 м.
С учетом "геометрического фактора" будем иметь:
sг = DOP * sг*
sн = DOP * sн *
где sг*, sн * - средние квадратические погрешности соответственно в горизонтальных координатах и высоте при DOP = 1,0.
Величина геометрического фактора, как правило, DOP £ 6 … 8. Принимая для практической навигации DOP = 5,0, получим средние квадратические погрешности:
- горизонтальных координат sг = 250 м;
- абсолютной высоты sн = 350 … 400 м.
Если в документах аэронавигационной информации (или в бортовом навигационном комплексе) не используется геодезическая система WGS-84, то радиальная погрешность за счет несоответствия систем координат может достигнуть величины 1 км.
В тех случаях, когда аппаратурой потребителя "захвачено" только три спутника и, следовательно, высота GPS-приемника относительно среднего уровня моря вводится вручную, то радиальная ошибка в позиции ВС может в два раза превышать ошибку в высоте. Так, например, если абсолютная высота введена с ошибкой Dн = 500 м, то погрешность в позиции ВС может достигать величины 1 км.
Фактический путевой угол и путевая скорость могут быть определены только в тех случаях, когда скорость воздушного судна превышает 30 узлов (55,56 км/ч).
Средняя квадратическая погрешность в определении фактической путевой скорости sW = 0,1 узла (0,1852 км/ч).
Точность определения позиции потребителя может быть существенно повышена при применении двухчастотных приемников (при использовании Р-кода) или при использовании дифференциального режима GPS.
Сущность дифференциального режима GPS заключается, в общих чертах, в следующем. В районе радиусом 50 … 100 км, например, для обеспечения захода на посадку, устанавливается контрольная станция (ЛККС), которая принимает сигналы спутников, определяет поправки в координаты для данного района и для текущего момента времени и передает полученные поправки потребителям по специальной линии радиосвязи. Для работы в этом режиме аппаратура потребителя должна иметь приемное устройство для связи с контрольной станцией и специальный дифференциальный режим работы компьютера.