

7. Радиомаячные системы посадки сантиметровых волн (рмсп смв).
Структура и принцип работы
РМСП СМВ представляет собой точную угломерно-дальномерную систему и выполняет следующие функции:
- получение на борту ВС и выдачу экипажу и в САУ информации об угловых отклонениях ВС от заданной траектории посадки в вертикальной (угол места) и горизонтальной (азимутальный угол) плоскостях;
- измерение дальности до расчетной точки приземления;
- передача на борт ВС разнообразной дополнительной информации.
При необходимости состав системы может быть расширен для обеспечения азимутальной информацией на этапе ухода на второй круг (и возможно на взлете), угломестной информацией на этапе выравнивания.
РМСП СМВ имеет большие размеры секторов пропорционального наведения ВС (рис.21.б), что позволяет формировать оптимальные траектории захода на посадку. Эти системы могут одновременно обслуживать большое число ВС, следующих по различным траекториям на всех этапах захода на посадку, посадки и руления, а также при взлете и уходе на второй круг.
Основной вариант комплектации наземного оборудования РМПС СМВ удовлетворяет
требованиям II категории, включает КРМ1, ГРМ1, ретранслятор дальномера и аппаратуру КДП, обеспечивающую автоматическую передачу данных на борт ВС, дистанционное управление РМ и сигнализацию.
Расширенный вариант удовлетворяет требованиям III категории и включает, кроме подсистем, аналогичных подсистемам основного варианта, также КРМ обратного азимута
КРМ 2.
Схема предполагаемого размещения оборудования РМСП СМВ приведена на рис. 38.

Курсовые радиомаяки излучают сигналы специальной формы (рис.39), с помощью которых на ВС измеряется азимутальный угол. Сигналы глиссадных радиомаяков позволяют получить на ВС информацию об угле места. Информация о дальности появляется на ВС в результате работы точной импульсной дальномерной системы, включающей запросчик дальности ЗД и наземный ретранслятор дальномера РД.
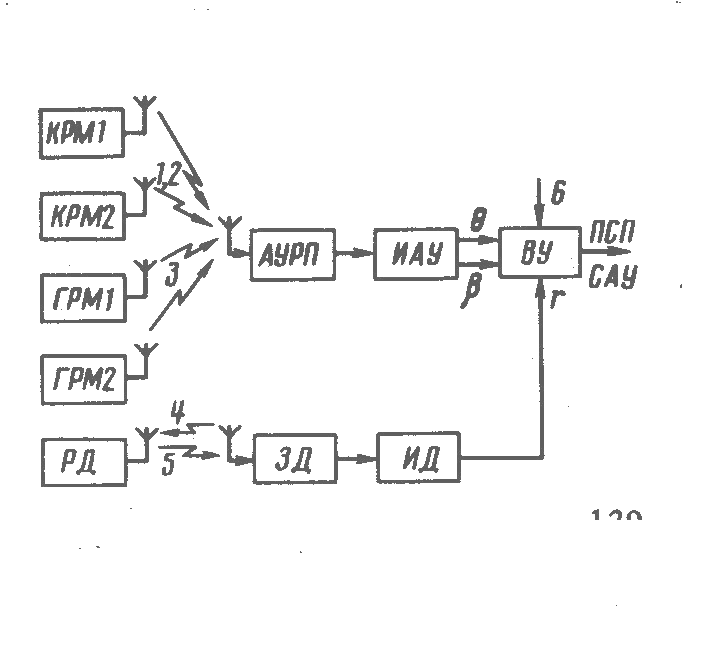
Рис. 39. Структурная схема РМСП:
1,2,3 - азимутальная, дополнительная и угломестная информация соответственно; 4 - запрос дальности; 5 - ответ (информация о дальности); 6 - параметры траектории посадки
Бортовое оборудование включает ряд функциональных элементов:
- азимутально-угломестный радиоприемник АУРП;
- измеритель азимутального угла и угла места ИАУ;
- запросчик дальности ЗД;
- измеритель дальности ИД;
- вычислительно устройство ВУ.
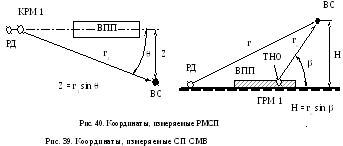
Оно обеспечивает прием сигналов радиомаяков и измерение трех координат ВС: азимутального угла θ, угла места β, и расстояния r (рис.40).
Указанные информация поступают в ВУ, которое преобразует их и вырабатывает данные о координатах Z и Н.
Для определения этих координат на ВС передаются данные о длине ВПП и размещении радиомаяков относительно ВПП, в результате чего может быть вычислено расстояние от ВС до точки размещения любого радиомаяка, а затем координаты
Z = r·sinΘ и Н = r0·sinβ.
В ВУ эти координаты сопоставляются с параметрами заданной траектории посадки. Сигналы отклонения ВС от заданной посадочной траектории ΔZ и ΔН, а также удаление до точки приземления подаются на приборы системы посадки (ПСП) и в систему автоматического управления (САУ). Иначе говоря, в ВУ формируется требуемая пространственно-временная траектория посадки, которая зависит от летоно-технических характеристик ВС и особенностей захода конкретного аэродрома.
Принцип функционирования радиомаяков РМСП
Принцип действия КРМ и ГРМ одинаков. Они являются радиомаяками со сканирующим лучом диаграммы направленности и реализуют временной метод измерения угловых координат с опорным временем.
Радиомаяк со сканирующим лучом состоит из передатчика ПРД и антенного устройства А (рис. 41).
Передатчик создает немодулированные СВЧ колебания, поступающие в антенное устройство, которое формирует узкий луч (в горизонтальной плоскости у КРМ или в вертикальной плоскости у ГРМ), который сканирует в горизонтальной (для КРМ) или вертикальной (для ГРМ) плоскости в заданном секторе.

Рис. 41. Сканирование луча ДНА в радиомаяках РМСП СМВ
Диаграммы направленности РМ имеют веерообразную (ножевидную) форму (рис. 42 а, б). Работа КРМ и ГРМ разнесено во времени, т.е. в них реализуется временное разделение каналов измерений и каналов передачи данных, благодаря чему все РМ и аппаратура передачи данных работают на одной и той же несущей частоте.

Рис. 42. Рабочие секторы и диаграммы направленности КРМ (а) и ГРМ (б) РМСП СМВ
Лучи ДНА сканируют упорядоченным образом. В некоторый момент времени (опорное время t оп), которое известно на ВС, так как информация о нем передается радиомаяком, начинается движение луча в направлении увеличения углов “Т” (туда) от границы сектора обзора. После достижения другой границы сектора и некоторой паузы происходит движение луча в обратном направлении “О” (обратно).
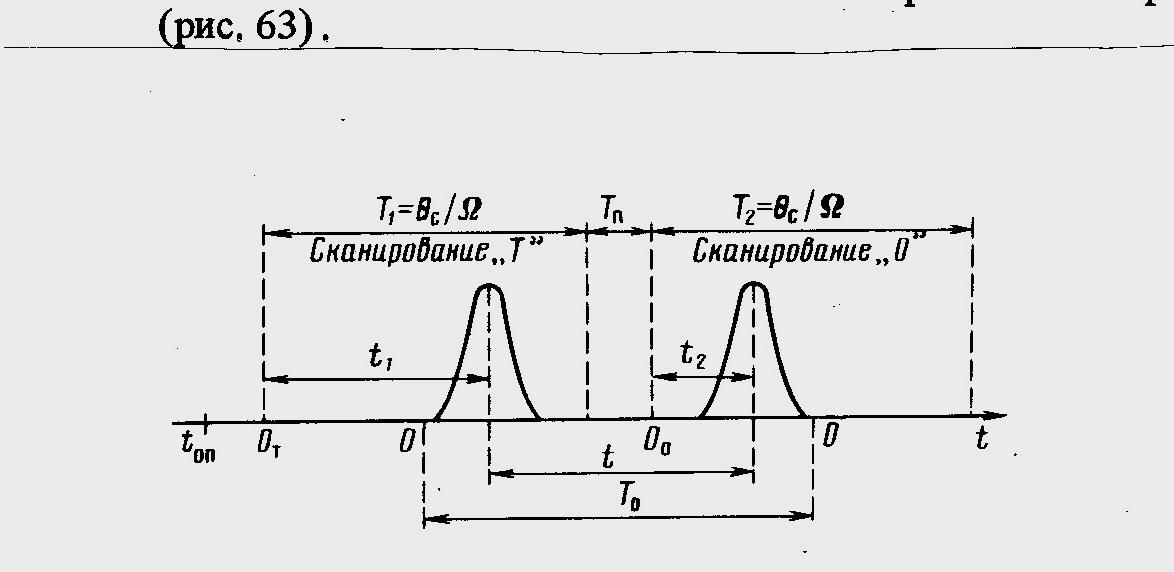
Рис. 43. Временные диаграммы сигналов радиомаяка РМСП, принимаемых на ВС
На ВС в те моменты времени, когда луч радиомаяка ориентирован в направлении ВС, принимаются два импульсных сигнала “Т” и “О. Моменты их возникновения зависят от углового положения ВС относительно биссектрисы сектора сканирования (рис.43).
Временной интервал между импульсами “Т” и “О” определиться как:
t = T1 + Tп + t2 - t1,
где: Т1 = Θс / Ώ - время движения луча в направлении “Т”; Θс - ширина сектора сканирования;
Ώ - угловая скорость сканирования луча; Тп - время паузы между сканированиями “Т” и “О”;
t 1= Θ1 / Ώ - время движения луча от границы сектора в направлении “Т” до направления на ВС;
t2 = Θ2 / Ώ - время движения луча от границы сектора в направлении “О” до направления на ВС;
Θ1 и Θ2 - угловые положения ВС относительно границ сектора.
С другой стороны
t1 = (Θс/2+Θ)/Ώ и t2 = (Θс/2-Θ)/Ώ.
С учетом этого имеем
t = Θс/Ώ + Tп - 2Θ/Ώ.
В направлении Θ = 0 (биссектриса сектора) t = Θс/Ώ + Tп = T0.
С учетом последнего выражения
t = T0 - 2Θ/Ώ или
Θ = (T0 - t) Ώ/2 = K(T0 - t).
Это выражение показывает, что угловое отклонение ВС от нулевого направления прямо пропорционально разности временного интервала между импульсами “Т” и “О” на нулевом направлении и текущим временным интервалом между этими импульсами. Так как T0 = const, временной интервал t зависит только от углового положения ВС Θ, и поэтому для определения на ВС угла Θ нужно измерить временной интервал между импульсами “Т” и “О”.
Кроме координатной информации, радиомаяки РМСП СМВ передают дополнительную информацию (основные и вспомогательные данные).
В качестве основных данных передается следующая информация:
- расстояние от антенны КРМ 1 до порога ВПП;
- границы зоны пропорционального наведения по азимуту;
- ширина луча ДНА;
- расстояние от ТНО до порога ВПП;
- расстояние от антенны РД до порога ВПП;
- минимальный угол наклона глиссады;
- высота угломестной антенны и ее смещение.
К вспомогательным данным относятся:
- информация о размещении наземного оборудования;
- информация о состоянии ВПП;
- метеорологическая информация и др.
С помощью РМСП СМВ осуществляется автоматическая передача на ЛА информации об аэродроме (ВПП), его категории, а также данные технического характера, необходимые для точного выполнения захода на посадку. Указанные функции выполняет подсистема автоматической передачи данных.
Эксплуатационно-технические характеристики измерительных и информационных подсистем различных типов РМСП СМВ приведены в таблице 5.
Таблица 5
|
Диапазон частот, МГц: для угломерного оборудования для дальномерного оборудования |
5000…5750 960…1215 |
|
Число рабочих каналов |
200 |
|
Зона действия: по азимуту, град по углу места, град по обратному азимуту, град по дальности, км дальность по обратному азимуту, км |
± 62 0,9…20 ±42 37
9,3 |
|
Погрешность (2s), м: по дальности по азимуту* по углу места* |
30,5 4,1 0,4 |
Примечание:* У начала ВПП длиной 3000 м.
Лекция 6. Наземные радиопеленгаторы
Наземные автоматические радиопеленгаторы (АРП) предназначены для определения азимута ВС относительно точки установки АРП по сигналам, излучаемым бортовыми радиостанциями диапазона МВ.
Результаты измерения азимута используются диспетчерами для УВД, управления посадкой и, в частности, для идентификации отметок от ВС на экранах РЛС (т.е. для определения принадлежности той или иной отметки определенному ВС). Они могут быть переданы на ВС и использованы экипажем для самолетовождения.
Антенные системы АРП, работающих в радиосетях "Подхода", "Круга" и "Посадки", ориентируются по магнитному меридиану, а антенные системы АРП, работающих в радиосетях РДП, - по истинному меридиану. Антенные системы двухканальных АРП, работающих в сетях "Подход", "Круг", "Посадка" и РДП одновременно, ориентируются по магнитному меридиану. При этом шкала индикатора АРП, установленного на рабочем месте диспетчера РДП, выставляется с учетом магнитного склонения и позволяет непосредственно определять истинный азимут ВС. В таблице 6 приведены основные характеристики АРП, применяемых в ГА.
Таблица 6.
|
Характеристика |
АРП-75 |
АРП-80 |
АРП-95 |
DF-2000 |
|
Диапазон частот, МГц |
118…136 |
118…136 |
118…136,975 |
100…400 |
|
Зона обзора в вертикальной плоскости, град |
38 |
60 |
45 |
60 |
|
Дальность действия, км: Н = 300 м Н = 1000 м Н = 3000 м Н = 10000 м |
- 100 180 300 |
65 120 200 - |
80 150
|
65 120 200 |
|
Погрешность пеленгования (2s), град |
6 |
3 |
1 |
1 |
|
Число каналов: рабочих резервных |
8 2 |
1 или 2 1 или 0 |
2…16 |
2…16 |
|
Тип индикатора |
Стрелочный
|
Стрелочно-цифровой |
Монитор компьютера |
Модуль индикации |
Наибольшее распространение в гражданской авиации получили радиопеленгаторы АРП-80 (“Тополь”) и АРП-85 ("Пихта").
Радиопеленгаторы АРП-80 и АРП-85 относятся к пеленгаторам доплеровского типа. Главной отличительной особенностью пеленгаторов этого типа является их высокая точность, которая достигается за счет уменьшения погрешностей, обусловленных влиянием отражений от земли и местных предметов. Последними разработками отечественных производителей являются АРП-95 и DF-2000 (“Платан”).
Принцип работы
Антенная система АРП (рис. 44) состоит из дух антенн:- неподвижной центральной А Ц и боковой А Б, вращающейся по окружности радиуса R c постоянной угловой скоростью Ω. Ее положение относительно меридиана места АРП характеризуется углом θ = Ω∙t, где t – текущее время.

Рис. 44. Геометрические соотношения, поясняющие работу АРП
При t = 0 , θ = 0. При приеме радиоволн от пеленгуемой радиостанции в А Ц возникает
напряжение
u ц = Um∙cos ωt (1)
c фазой φ ц =ωt, которую принимают за начальную.
Фаза напряжения в боковой антенне φ б отличается от начальной фазы φ ц на величину φ r которая вызвана разностью хода
r = R∙ cos (θ - α), (2)
где: R- радиус окружности вращения А Б;
θ – угловое положение А Б;
α – пеленг радиостанции.
При этом φ r / 2π = r / λ, откуда φ r = 2π∙r/λ.
С учетом (2) найдем
φr = 2π∙R cos (θ - α)/ λ. (3)
Поскольку φ б = φ r + φ ц, находим
φ б = ωt + 2π ∙ R cos (Ωt – α)/ λ. (4)
Напряжение в боковой антенне
u б = Um cos [ωt+2π∙R cos (Ωt- α)/λ] (5)
Выражение (5) показывает, что вращение боковой антенны вызывает фазовую модуляцию принятых ею сигналов с индексом модуляции 2πR/λ, представляющую собой эффект Доплера. При этом информация о пеленге содержится в фазе модулирующего колебания. Измерение разности фаз колебаний, принятых центральной и боковой антеннами, позволяет определить пеленг радиостанции.
Структурная схема АРП (рис. 45)

Рис. 45. Структурная схема АРП
Сигналы, принятые АЦ и АБ, подаются на входы приемников ПРМ1 и ПРМ2 , имеющих одинаковые фазовые характеристики, и после усиления поступают на фазовый детектор (ФД). На выходе ФД выделяется напряжение низкой частоты Ω, равной угловой скорости вращения антенны, фаза которого φr (см.3) зависит от пеленга радиостанции α. Это напряжение подводится к измерителю фазы ФИ, куда одновременно подается опорное напряжение той же частоты Ω от ГОН. Начальная фаза колебаний, вырабатываемых ГОН, совпадает с моментом прохождения АБ северного направления, а измерение разности фаз обоих напряжений позволяет определить пеленг радиостанции.
Механическое вращение АБ вызывает большие трудности, так как радиус вращения должен быть большим, а скорость вращения высокой. По этой причине вращение одной антенны заменяют последовательным переключением большого числа антенн, расположенных по окружности радиуса R (рис. 46) на расстоянии d ≤ λ/2 друг от друга. Это переключение обеспечивает специальный коммутатор механического или электронного типа.
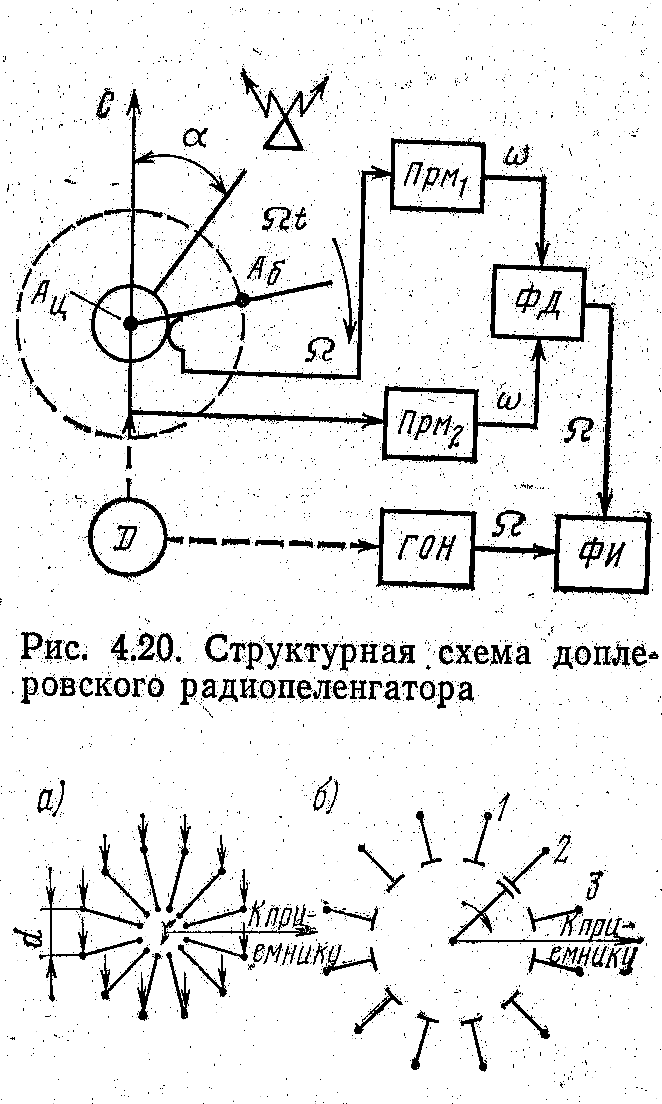
Рис. 46. Схема переключения антенн АРП
Лекция. 7. Дальномерные радионавигационные системы
Дальномерные РМС предназначены для точного измерения дальности до фиксированного наземного пункта, в котором установлен ретранслятор дальномера.
Принцип действия дальномерных РНС основан на временном (импульсном) запросном методе измерения дальности. Для повышения помехозащищенности сигналы запроса и ответа передаются на разных частотах с использованием отличных друг от друга двухимпульсныех интервально-временных кодов.
В практике оснащения воздушных трасс и аэродромов дальномерные РМС обычно совмещаются с всенаправленными азимутальными радиомаяками или входят в состав оборудования радиомаячных систем посадки. В первом сочетании образуется угломерно-дальномерная система ближней навигации (РСБН, ВОР/ДМЕ, ТАКАН), во втором – имеется возможность определения удаления от оптимальной точки приземления.
Стандартами ИКАО определяются основные параметры дальномерных РНС:
- дальность действия (если она не ограничивается дальностью прямой видимости) составляет для:
- трассовых ретрансляторов не менее 370 км;
- дальность действия для аэродромных ретрансляторов 95 км;
- погрешность измерения дальности (2sД), м:
при Д < 148 км 370 м;
при Д > 148 км 0,25% Д;
- погрешность прецизионного ретранслятора систем посадки в
опорной точке (2sД), м - 30;
- число частотно-кодовых каналов 252;
- пропускная способность, число ВС 100.
Основные характеристики международной дальномерной системы ДМЕ
Импульсная дальномерная система ДМЕ (Distance Measuring Equipment) рекомендована ИКАО в качестве международной системы для обеспечения полетов ВС ГА [2]. В системе использован принцип измерения дальности "запрос-ответ". С учетом назначения (обеспечение посадки или полета по трассам) в системе могут использоваться ретрансляторы, обладающие различной импульсной мощностью передатчиков - 1, 4 или 16 кВт. Соответствующие этим значения мощности зоны действия показаны на рис. 47.
Аэродромные ретрансляторы обычно используются совместно с системой посадки ИЛС для определения наклонной дальности до точки приземления на ВПП. Обычно их размещают в точке установки глиссадного радиомаяка ИЛС. Ретрансляторы ДМЕ используются также в системах посадки сантиметрового диапазона. Для обеспечения меньшей погрешности при этом применяется прецизионная система ДМЕ/П.
Трассовые ретрансляторы часто совмещают с всенаправленными фазовыми радиомаяками ВОР. Образующаяся при этом угломерно-дальномерная система ВОР/ДМЕ получила широкое распространение. Средняя частота излучаемых ответных сигналов поддерживается постоянной. Кроме того, через каждые 30 … 40 с наземный маяк передает представленные кодом Морзе сигналы звукового опознавания. Эти сигналы имеют вид кодированных пар импульсов и следуют с частотой 1350 Гц. На время передачи сигналов опознавания излучение ответных сигналов дальности прекращается. Время передачи позывных маяка, состоящих из трех букв, не более 5 с.

Ретрансляторы ДМЕ, используемые совместно с системой посадки ИЛС или радиомаяком ВОР, излучают позывные сигналы курсового радиомаяка или радиомаяка ВОР соответственно.
Удвоенная среднеквадратическая погрешность измерения наклонной дальности от ВС до ретранслятора в пределах рабочей области характеризуется значениями:
2sDД = 370 м при Д £ 148 км;
2sDД = 0,25%Д при Д > 148 км.
Погрешность прецизионной системы ДМЕ/П
2sDД = 30 м при Д < 18 км.
Система ДМЕ работает в диапазоне частот 962 …1213 МГц.
Запрос с борта осуществляется на 126 фиксированных частотах f3. На каждой из несущих частот используются два кода запроса tК1 = 12 мкс и tК2 = 36 мкс. Это позволяет сформировать 252 частотно-кодовых канала сигналов запроса дальности. 252 частотно-кодовых канала ответа ретранслятора образуются путем использования 126 несущих частот fотв = f3 - 63 МГц при значении tК1 = 12 мкс и 126 несущих частот fотв = f3 + 63 МГц с кодовым интервалом tК2 = 30 мкс.
При совместном использовании ДМЕ с системами ИЛС и ВОР, работающими в диапазоне 108 … 117,95 МГц осуществляется сопряжение каналов связи ДМЕ с каналами данных систем ИЛС или ДМЕ, при этом используются только 200 частотно-кодовых каналов ДМЕ. Каналы с частотами запроса f31 … f316 и f360 … f369 не используются. Смена кодов запроса происходит при переходе на 64-ю фиксированную частоту.
Наземный ретранслятор имеет антенную систему высотой 10,5 м. Ширина основного лепестка диаграммы направленности в вертикальной плоскости согласно требований ИКАО равна 6°. В горизонтальной плоскости антенна ретранслятора всенаправлена.
Принцип функционирования ретранслятора ДМЕ
Принцип работы наземных ретрансляторов ДМЕ (рис.48) заключается в следующем. Они работают в режиме постоянного импульсного заполнения с приоритетом сильных сигналов. Запросные сигналы бортовых дальномеров принимаются приемо-передающей антенной (А) на частоте запроса f з и представляют собой кодированные пары импульсов. Количество поступающих запросов зависит от числа ВС в зоне действия маяка и может изменяться от 0 до 3000 пар в секунду. Принятые запросные сигналы через антенный переключатель (АП) поступают в приемник (ПРМ), где усиливаются и детектируются. С выхода ПРМ запросные сигналы поступают в дешифратор (ДШ), где преобразуются в одиночные импульсы запроса.

Рис.
48. Структурная схема ретранслятора DME
Эти импульсы запускают устройство формирования ответов (УФО) и счетчик импульсов (СЧ). Последний осуществляет подсчет поступивших запросов и вырабатывает управляющие сигналы, которые запускают в работу устройство дополнения ответов (УДО) и управляют работой схемы автоматической регулировки усиления приемника (АРУ). Устройство дополнения ответов вырабатывает последовательность импульсных сигналов, число которых может меняться от 0 до 2700 импульсов в секунду. Импульсы УДО поступают в УФО, обеспечивая на его выходе постоянное число ответов, равное 2700 импульсов в секунду. Таким образом, независимо от числа поступивших запросов количество сформированных ответов остается всегда постоянным (постоянное импульсное заполнение). С другой стороны по мере увеличения числа запросов СЧ изменяет управляющее напряжение АРУ и коэффициент усиления приемника, отсеивая слабые (поступившие от ВС, находящихся на больших удалениях) запросные сигналы. С выхода УФО сформированные импульсы ответа поступают в блок задержки (БЗ), где задерживаются на постоянное время То, что необходимо для обеспечения возможности измерения на борту ВС дальностей до ретранслятора, близких к нулевой. С выхода БЗ импульсы ответа поступают в шифратор (Ш), где преобразуются кодовые ответные пары. С выхода шифратора сигналы поступают на запуск передатчика (ПРД), который формирует высокочастотные ответные сигналы на частоте f отв. Через АП сигналы ПРД поступают в антенну и излучаются в пространство.
Важнейшей характеристикой ретранслятора ДМЕ является его пропускная способность, т.е. количество воздушных судов, обслуживаемых одновременно. Она характеризуется коэффициентом ответности Котв, который является отношением числа ответов к числу поступивших запросов. Для ретранслятора ДМЕ значение Котв устанавливается равным 0,9, что соответствует 100 одновременно обслуживаемым ВС. Стандартами ИКАО этот параметр ретранслятора оговаривается в пределах Котв ≥ 0,5…0,7 при максимальном числе ВС не более 100.
В настоящее время отечественной промышленностью разработаны наземные радиомаяки, полностью отвечающие стандартам ИКАО. Их основные характеристики представлены в таблице 7 .
Таблица 7
-
Основные ЭТХ
РМД - 90
DME - 2000
Диапазон частот, МГц:
- канал приема
- канал ответа
1025…1150
962…1213
Зона действия:
- гориз. плоскость, град.
- вертик. плоскость, град.
- по дальности, км:
При Н=6000 м
При Н = 12000 м
0…360
0…40
200
260
0…360
0…40
240
340
Погрешность, вносимая в измерение дальности маяком (2σ), м
75
75 при работе с ILS
150 при работе с VOR
Среднее время наработки на отказ Т0, час.
5000
30000
Среднее время восстановления
Твост., мин
30
30
Пропускная способность
100 ВС
200 ВС
Лекция 8. Всенаправленные радиомаяки (ВРМ)
Назначение - привода ВС на аэродромы; и для самолетовождения по воздушным трассам. Они устанавливаются на аэродромах и в определенных точках воздушных трасс, в первую очередь в районах с высокой интенсивностью воздушного движения, в интересах обеспечения безопасности и эффективности полетов в качестве стандартной международной системы.
. Их устанавливают также в международных аэропортах и на воздушных трассах СНГ, выделенных для полетов ВС зарубежных авиакомпаний.
Определяемый навигационный параметр - магнитного азимута ВС, называемого также магнитным пеленгом ВС, относительно точки расположения РМ. Информация, получаемая с помощью РМ, отображается на борту в виде магнитного пеленга РМ, связанного с азимутом ВС следующей зависимостью:
МПР = А ± 180° + d ,
где d - поправка на схождение меридианов, знак “+” требуется для 0 £ A £ 180°, знак “ - “ при 180° £ A £ 360°.
Азимут используется для определения КУР, МПР, МК (рис.49). Величины КУР, МРП и МК отображаются на радиомагнитном индикаторе.
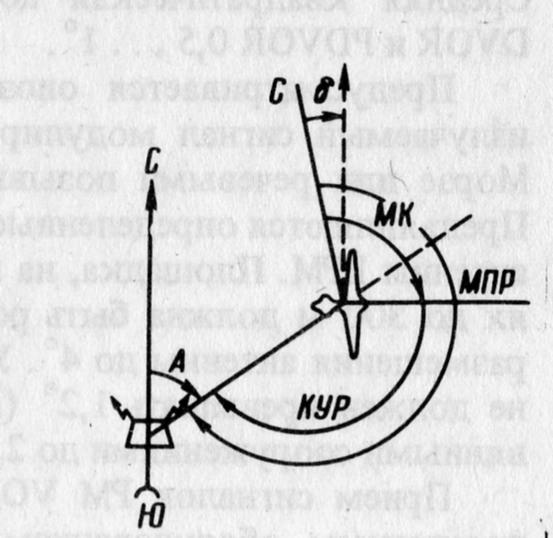
Рис. 49. Величины, измеряемые с помощью ВРМ
В гражданской авиации находят применение несколько разновидностей ВРМ типа VOR. Радиомаяки могут применяться автономно или совместно с дальномерной системой DME.
Основные эксплуатационно-технические характеристики ВРМ всех типов (за исключением точности) одинаковы и соответствуют нормам ИКАО. Они работают в диапазоне 108…118 МГц, в котором формируется 200 частотных каналов с разносом частот 50 кГц. При этом 160 каналов отводится для работы ВРМ, 40 - для работы курсовых РМ (КРМ) систем посадки самолетов.
Распределение каналов между РМ VOR и КРМ осуществляется следующим образом:
- курсовые РМ работают в диапазоне 108 … 112 МГц, который совпадает с диапазоном частот, отводимым РМ типа VOR. Поэтому в диапазоне 108 … 112 МГц для VOR отводятся частоты с четными значениями цифр, соответствующими десятым долям мегагерц, для КРМ – нечетными.
Дальность действия РМ зависит от их целевого назначения и высоты полета. Трассовые ВРМ оснащаются передатчиками мощностью 200 Вт и обеспечивают дальность действия до 370 км (на высотах, обеспечивающих прием сигналов в пределах прямой видимости), мощность излучения передатчиков аэродромных ВРМ составляет 50 Вт, дальность действия таких РМ
50 км.
Согласно нормам ИКАО погрешности определения азимута, вносимые аппаратурой РМ, не должны превышать 2°, а погрешности вследствие несовершенства бортовой аппаратуры не более 3°, результирующая погрешность при этом не превысит 3,6°.
При приеме сигналов ВРМ VOR основной вклад в погрешность измерений вносят погрешности, обусловленные влиянием отражений от неровностей рельефа и местных предметов. Средняя квадратическая погрешность определения азимута по ВРМ 0,5 … 1°. В системе обеспечивается опознавание ВРМ. Для этого излучаемый сигнал модулируется низкочастотными колебаниями кода Морзе или речевыми позывными, выдаваемыми с магнитной ленты.
Принцип функционирования ВРМ
В составе принимаемого на самолёте сигнала от маяка VOR имеются сигналы опорной фазы и переменной фазы. Фаза опорного сигнала не зависит от положения самолёта относительно маяка, а фаза переменного сигнала зависит от направления приёма. Измеряя разность фаз между ними в точке приёма, можно определить направление на маяк.
Рассмотрим процесс формирования сигнала VOR (рис.1).
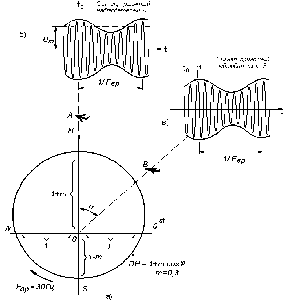
Рис. 50. Формирование сигнала “переменной” фазы в радиомаяке VOR
Антенна маяка VOR имеет диаграмму направленности (ДН) по напряжённости поля
DH = 1+ m∙cos φ при m = 0,3 (улитка Паскаля). По форме эта ДН близка к форме окружности со смещённым центром.
ДН антенны маяка вращается со скоростью 30 об/сек (Fвр = 30 Гц).
Пусть в момент t = 0 максимум ДН направлен на магнитный север, т.е. магнитный меридиан проходит через ось симметрии ДН. Отметим, что все маяки VOR ориентированы на магнитный север.
Положение наблюдателя (самолёта) относительно маяка VOR принято характеризовать магнитным азимутом (магнитным пеленгом), т.е. углом между магнитным меридианом, проходящим через маяк, и направлением от маяка на наблюдателя. Угол измеряется от магнитного меридиана по часовой стрелке от 0 до 360 град. В дальнейшем вместо термина «магнитный азимут» («магнитный пеленг») будем употреблять термин «азимут». Таким образом, на рис.1а азимут наблюдателя А равен 0 град, а азимут наблюдателя В равен α.
Пусть в момент t = 0 напряжённость поля излучения антенны в направлении 0W и 00ST равна 1, в направлении 0N равна 1+ m, а в направлении 0S равна 1- m.
Предположим, что маяк излучает немодулированную несущую fo . Тогда сигнал, принятый наблюдателем в точке А, можно записать в виде
uA = Um ∙ [ 1+ m∙ cos(2π ∙Fвр∙t)] cos 2πf∙t
а сигнал, приятый наблюдателем в точке В, в виде
uВ = Um∙ [1 + m cos(2π∙Fвр∙ t - α )] cos 2πf∙t.
Таким образом, в точках А и В наблюдатели получили на входах приёмников амплитудно-модулированный сигнал. Коэффициент модуляции m для маяков V0Р равен 30%.
В точке А максимум модулирующего напряжения достигается в момент t0, а в точке В - в момент t1. Если бы наблюдателю В был известен момент времени t0, то измеряя t1- t0 и зная частоту вращения ДН, можно было бы вычислить свой азимут α.
Для того, чтобы сообщить наблюдателю момент совпадения максимума ДН с направлением
на магнитный север (т.е. момент t0), в маяке формируют сигнал « Опорной фазы» - гармонику частотой 30 Гц, максимум которой соответствует моменту t0 (рис.2а) и сигнал поднесущей - гармонику частотой 9960 Гц.
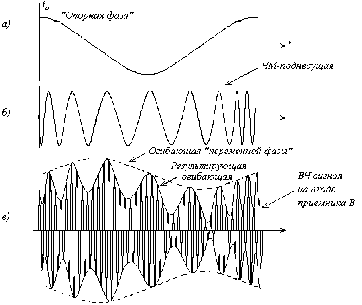
Рис. 51. Суммарный сигнал радиомаяка VOR
Поднесущую модулируют по частоте сигналом «Опорной фазы» с девиацией частоты
± 480 Гц. Таким образом, что в момент совпадения максимума ДН с направлением на север сигнал поднесущей имеет максимум частоты, равный 10440 Гц (рис.2б). Далее частотно-модулированной поднесущей модулируют излучаемый маяком сигнал по амплитуде с коэффициентом модуляции 30%. На рис.2в показан ВЧ сигнал, принимаемый наблюдателем в точке В. Его огибающая имеет сложный вид и содержит в себе информацию об «Опорной фазе» и о «Переменной фазе» (временные масштабы на рис.2 искажены).
В приёмнике после обработки выделяют сигналы «Опорной фазы» и «Переменной фазы». Измеряя разность фаз между ними, вычисляют азимут наблюдателя.
Следует отметить, что в действительности сигнал маяка V0R может формироваться различными способами, например, с помощью двух антенн - одной неподвижной и одной подвижной, или за счёт электронного вращателя и т.д.
В системе В0Р предусмотрена возможность опознавания маяка. Для этого используют тональную модуляцию несущих колебаний частотой 1020 Гц, а сообщение передают кодом
Морзе. Используют также модуляцию речевым сообщением.
В настоящее время наибольшее распространение получили ВРМ VOR доплеровского типа (DVOR) и его разновидность - маяки повышенной точности их называют еще прецизионными (PDVOR). По принципу действия они одинаковы и аналогичны принципу действия наземных пеленгаторов доплеровского типа. На рис.52 представлена схема антенной системы фазового радиомаяка доплеровского типа.
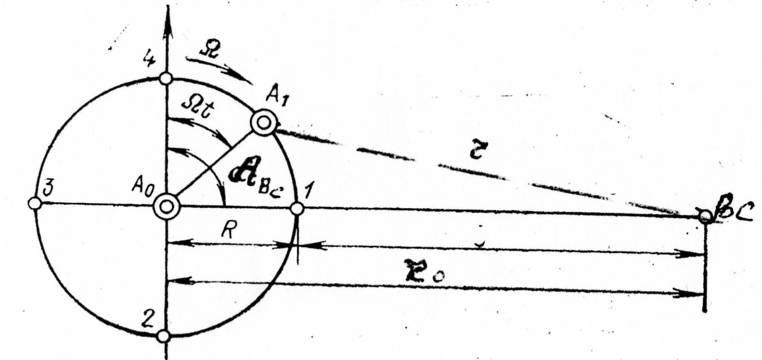
Рис. 52. Схема антенной системы доплеровского ВРМ
Она состоит из неподвижной центральной антенны А0 и подвижной антенны А1, которая вращается по окружности радиуса R c постоянной скоростью Ω. Если антенна А1 излучает сигнал е1 = Еm1·sinωt , то в точке приема на ВС этот сигнал будет иметь вид:
евс = Еm·sinω(t - tз),
где - tз = r/c - время запаздывания сигнала при прохождении им расстояния r между ВРМ и ВС.
При вращении антенны А1 расстояние r изменяется по закону
r = r0 - R· сos (Ωt - Авс),
где: R - радиус окружности вращения антенны А1;
Авс - азимут ВС;
Ω - угловая скорость вращения антенны А1 (Ω = 2πF).
Таким образом, принятый на ВС сигнал будет иметь переменную фазу и, как следствие, частоту, которая равна ω пр = dφ/dt.
Cигнал, принимаемый на ВС, окончательно будет иметь вид
евс = Em· sin {ωt - ω ·[r0 - R· cos (Ωt - Авс)]/с}.
Частота этого сигнала будет равна
ω пр = ω - (2π/ λ) ·Ω·R· sin (Ωt- Авс).
Таким образом, сигнал, принимаемый на ВС, представляет частотно-модулированное колебание, причем начальная фаза модуляции частоты равна азимуту ВС. Измеряя фазу модуляции можно определить азимут ВС. Поскольку изменение частоты сигналов, принимаемых на ВС, обусловлено доплеровским сдвигом, возникающим из-за движения антенны А1 относительно ВС, радиомаяки получили название доплеровских.
Неподвижная антенна А0 служит для излучения опорного сигнала частоты Ω, фаза которого не зависит от азимута ВС относительно маяка.
На борту ВС после приема и преобразования выделяются два сигнала: - опорный Uоп = Um· cos Ωt и “рабочий ” - Uр = Um·cos(Ωt- Авс). При Авс = 00 фазы этих сигналов равны, в любом другом направлении они будут различны. Таким образом, процесс измерения азимута на борту заключается в сравнении фаз двух сигналов - “рабочего” и опорного
Авс = φр - φоп.
В реальных маяках механическое вращение боковой антенны А1 заменяется последовательным подключением вибраторов, расположенных на окружности заданного радиуса R (рис.53). Радиус окружности R = 6,6м, количество вибраторов N = 39. Вибраторы работают попарно (1-21;2-22; …12-32;19-39).

Рис. 53. Схема коммутации вибраторов антенны ВРМ
Прием сигналов РМ VOR на борту осуществляется навигационно-посадочным оборудованием систем "Курс-МП",VIM-95 или других типов, в котором имеется два независимых канала, позволяющих одновременно измерять МПС по двум РМ. Результаты измерения отображаются с помощью двухстрелочного радиомагнитного индикатора РМИ-2Б или индикаторов аналогичного типа.
В табл.8 приведены основные эксплуатационно-технические характеристики типовых ВРМ.
Таблица 8
|
ВРМ |
VOR |
DVOR |
PDVOR |
DVOR -2000 |
РМА-90 |
|
Погрешность измерения азимута (2s), град |
3,6 (до 5) (20-РМ;30-БО) |
1…2 |
1…2 |
1 |
1 |
|
Дальность действия, км: |
|
||||
|
трассовые ВРМ при Нэш = 10000м |
370 |
360 |
300 |
||
|
аэродромные |
50 |
240 |
150 |
||
|
Число рабочих каналов |
160 |
200 |
200 |
||
Лекция 8. Угломерно-дальномерные радионавигационные системы (УД РНС)
Общая характеристика УД РНС
Угломерно-дальномерные радионавигационные системы работают в диапазонах МВ и ДМВ и поэтому относятся к радиотехническим средствам ближней навигации. Наземное оборудование этих систем, называемое радиомаяками (РМ), устанавливается на воздушных трассах и аэродромах и предназначено для навигационного обеспечения полетов по воздушным трассам, привода ВС в район аэродрома и выхода в зону действия посадочных систем.
Угломерно-дальномерные РНС обеспечивают непосредственное получение информации об азимуте ВС относительно точки установки РМ и о расстоянии от ВС до этой точки. Поэтому такие системы часто называются азимутально-дальномерными. Новейшие поколения бортовой аппаратуры УДС предоставляют возможность измерять не только азимут и дальность до одного РМ, но и дальности до двух РМ (режим 2D). Измерение двух дальностей при определенных условиях позволяет достигнуть более высокой точности определения места ВС.
В гражданской авиации применяются отечественные азимутально-дальномерные системы РСБН (радиотехнические системы ближней навигации). За рубежом используются системы, в состав которых входят всенаправленные маяки семейства VOR и радиодальномеры DME. Эти же системы устанавливаются в отечественных международных аэропортах.
В настоящее время эксплуатируется несколько разновидностей бортового оборудования и наземных РМ системы РСБН: РСБН-4Н, Е-324 и Е-239 в магистральных аэропортах и на воздушных трассах и РСБН-6 и Е-326 на местных воздушных линиях.
Радионавигационная система РСБН позволяет решать следующие задачи воздушной навигации:
- непрерывное автоматическое определение местоположения ВС на борту и опознавание наземных РМ;
- полет по любому прямолинейному и ломаному маршруту как проходящему через точку расположения РМ, так и не проходящему через нее в режиме ручного, директорного или автоматического управления ВС;
- коррекцию автономных систем воздушной навигации.
. В состав РСБН входит наземное и бортовое оборудование.
Наземное оборудование:
- всенаправленный радиомаяк (ВРМ);
- ретранслятор дальномера (РД);-
- выносной индикатор кругового обзора (ВИКО) с пультом дистанционного управления, устанавливаемый на КДП;
- аппаратуру контрольного выносного пункта (КВП);
- радиостанция для связи с самолетами.
- может устанавливаться посадочное оборудование ПРМГ (КРМ, ГРМ, РД)
Бортовое оборудование:
- самолетный запросчик дальности СЗД;
- самолетный приемник азимута и дальности СПАД или АДПК;
- блок измерения дальности БД;
- блок измерения азимута БИА;
- пульты управления и индикаторные приборы (ППДА, КППМ)
- блоки связи с системами самолета
В системе РСБН выделяют три функциональных канала:
- канал измерения дальности на борту, называемый дальномерным;
- канал измерения азимута на борту, называемый азимутальным;
- индикаторный канал для измерения координат ВС на земле.
Принцип действия каналов УД РНС
Дальномерный канал
Измерение дальности на борту осуществляется импульсным методом путем запроса с борта ВС и переизлучения запросных сигналов наземным ретранслятором дальности. При этом для обеспечения высокой надежности функционирования запрос с ВС и ответ с земли осуществляются двухимпульсными кодированными посылками. Функциональная схема канала измерения дальности в системе РСБН аналогична функциональной схеме радиодальномера. В состав РД входит приемник и передатчик с ненаправленными в горизонтальной плоскости антеннами.
Азимутальный канал РСБН включает элементы всенаправленного РМ.
Азимутальная антенна формирует в горизонтальной плоскости 2-х лепестковую ДН, которая вращается с постоянной скоростью 100 об/мин.Измерение азимута ВС сводится к измерению временного интервала между моментом, когда ось азимутальной антенны проходит северное направление, и моментом, когда она проходит направление на ВС.
Измерение азимута ВС сводится к измерению временного интервала t α между моментом, когда ось симметрии ДНА азимутальной антенны проходит северное направление, и моментом, когда она проходит направление на ВС (рис.54).
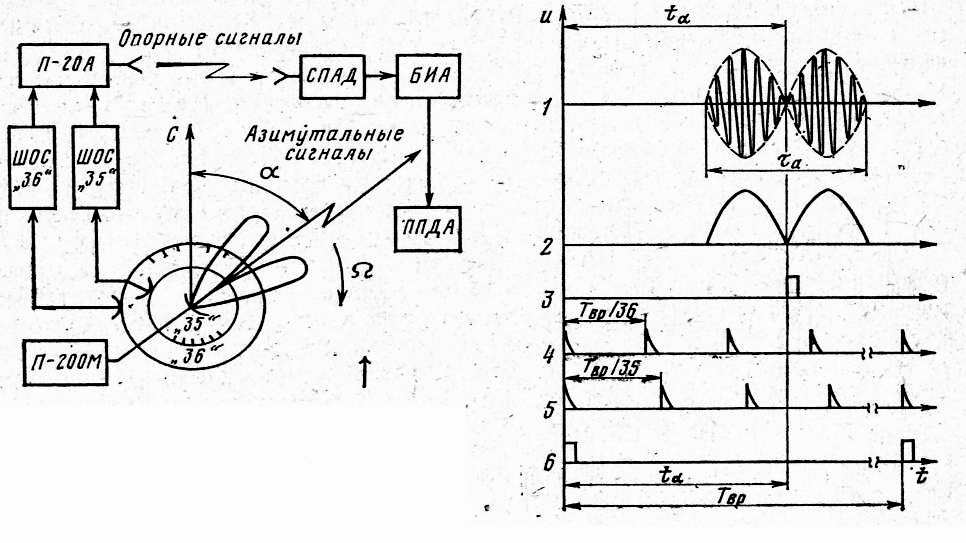
Рис. 54. Схема азимутального канала и временные диаграммы его работы
Через азимутальную антенну излучаются немодулированные колебания ПРД- 200М (рис.54 диаграмма 1). После обработки в СПАД на его выходе выделяется сигнал, имеющий форму двух примыкающих друг к другу импульсов (рис.54 диаграмма 2). В БИА из них формируется так называемый азимутальный импульс, передний фронт которого совпадает со средней точкой азимутального сигнала (рис.54 диаграмма 3).
Для формирования момента начала отсчета времени t α наземный маяк передает две серии специальных опорных сигналов, из которых на борту формируется импульс “Север ”(рис.54 диаграмма 6). Передний фронт этого импульса совпадает по времени с моментом, когда ось симметрии ДНА азимутальной антенны проходит направление меридиана места установки ВРМ. Для передачи серий опорных сигналов, в состав ВРМ входит передатчик ПРД- 20А и ненаправленная антенна. Для формирования серий опорных сигналов используются диски с магнитными вставками, закрепленными на оси вращения направленной антенны, а также индукционных катушек, установленных на неподвижном основании. При вращении антенны магнитные вставки возбуждают в катушках импульсы, из которых формируются серии опорных сигналов, подводимые к ПРД-20А.
. Первая серия включает 36 импульсов, а вторая - 35 импульсов за один оборот направленной антенны (рис.54 диаграммы 4 и 5). Импульсы первой серии следуют через 100 угла поворота антенны и используются для грубого определения азимута. Импульсы второй серии совместно с импульсами первой серии позволяют сформировать опорный импульс “Север”. С этой целью импульсы обеих серий совмещаются друг с другом только один раз за период обращения антенны в момент, когда ось симметрии направленной антенны ориентирована на север.
Поэтому формирования импульса “Север” на борту осуществляется путем определения момента совпадения импульсов серии 35 и 36.
Сигналы ВРМ принимаются на борту ВС приемником СПАД или АДПК, и после усиления и преобразования поступают в блок измерения и обработки БИА. В БИА измеряется временной интервал между «северным» - опорным импульсом и азимутальным сигналом. Схема измерения построена по двухшкальному принципу. Вначале определяется число десятиградусных импульсов серии “36” - грубая шкала, а затем интервал между последним десятиградусным и азимутальным импульсом - точная шкала. Результаты измерений отображаются на индикаторах и на некоторых типах ВС могут подаваться в навигационное вычислительное устройство НВУ.
Индикаторный канал
Позволяет определять на земле и отображать на экране ИКО полярные координаты ВС, оснащенных бортовым оборудованием РСБН. Координаты ВС определяют методом вторичной радиолокации путем использования основных элементов азимутального ВРМ, ретранслятора дальномера и бортового оборудования ВС. Принцип измерения состоит в излучении наземным передатчиком зондирующих импульсов (запрос индикации), ретрансляции этих импульсов бортовым оборудованием РСБН и приеме их на земле. Измеряя время задержки принятого сигнала, определяют расстояние от РМ до ВС, а, фиксируя угловое положение оси ДНА в момент прихода ответного сигнала, находят азимут ВС.
Индикаторный канал (рис. 55) работает независимо от азимутального и дальномерного каналов, обеспечивающих измерение азимута и дальности на борту. Независимость обеспечивается использованием в этом канале трехимпульсных кодовых посылок (для измерения на борту используются двух импульсные коды). Датчиком импульсов запроса являются магнитные вставки, закрепленные на диске, установленном на оси вращения направленной антенны через каждые 20 угла поворота (рис.55). С помощью этих датчиков осуществляется запуск схемы формирования напряжения развертки, управляющего радиальным движением луча на экране ИКО. Принятый с ВС ответный сигнал в дешифраторе ДУ радиомаяка (рис.55) преобразуется в одиночный импульс, который отображается на линии развертки ИКО в виде яркостной отметки (рис.56 б).

Рис. 55. Схема индикаторного канала РСБН