

5. Геометрический расчет кинематики эмп
Геометрические размеры зубчатых колес находятся по справочным таблицам [1].
Делительный
диаметр: ![]() ,
,
Диаметр вершин
зубьев: ![]() ,
,
Диаметр впадин: ![]() ,
где
,
где
с* – коэффициент радиального зазора
с* =0,5, если m <= 0,5
с* =0,35, если m > 0,5
Ширина колеса: ![]() ,
,
Ширина шестерни: ![]() ,
где
,
где
ψbm – коэффициент, равный отношению ширины зубчатого венца к модулю
ψbm = 6 для колес и шестерен
Делительное
межосевое расстояние: ![]()
Табл. 5.1. Параметры колес
|
П
№ колеса |
m, мм |
z |
|
|
|
b, мм |
|
|
1 |
0,4 |
24 |
9.6 |
10,4 |
8,4 |
4 |
16,8 |
|
2 |
60 |
24 |
24,8 |
22,8 |
2 |
||
|
3 |
0,4 |
24 |
9.6 |
10,4 |
8,4 |
4 |
24,4 |
|
4 |
98 |
39.2 |
40 |
38 |
2 |
||
|
5 |
0,5 |
24 |
12 |
13 |
10,5 |
5 |
31 |
|
6 |
100 |
50 |
51 |
48,5 |
2.5 |
||
|
7 |
0.8 |
24 |
19.2 |
20.8 |
17.04 |
8 |
65.6 |
|
8 |
140 |
112 |
113.6 |
109.84 |
4 |
 араметр
араметр
6. Точностной расчет разрабатываемой кинематики
Назначим для рассчитываемого ЭМП 7-ю степень точности и вид сопряжения — G.
6.1 Определение кинематической погрешности
Минимальное значение кинематической погрешности зубчатого колеса
![]() - для 7-ой степени
точности
- для 7-ой степени
точности
![]() -
коэффициент фазовой компенсации
-
коэффициент фазовой компенсации
![]()
![]() - допуск на
накопленную погрешность шага зубчатого
колеса (шестерни)
- допуск на
накопленную погрешность шага зубчатого
колеса (шестерни)
![]() - допуск на
погрешность профиля зуба
- допуск на
погрешность профиля зуба
|
|
KS |
Fp 1 |
Fp 2 |
ff |
F ’i 0 min |
|
i1-2=2,5 |
0,83 |
22 |
24 |
9 |
34,08 |
|
i3-4=4,083 |
0,96 |
22 |
30 |
9 |
40,896 |
|
i5-6=4,167 |
0,96 |
24 |
35 |
10 |
42,174 |
|
i7-8=5,833 |
0,96 |
26 |
42 |
10 |
41,237 |
Максимальное значение кинематической погрешности зубчатого колеса
![]()
![]() -
коэффицент фазовой компенсации
-
коэффицент фазовой компенсации
![]() -
допуск на кинематическую погрешность
шестерни и колеса,
-
допуск на кинематическую погрешность
шестерни и колеса,
рассчитывается
по формуле ![]()
![]() - приведенная
погрешность монтажа
- приведенная
погрешность монтажа
Для прямозубых
передач
![]()
![]() - монтажное
радиальное биение зубчатого колеса
- монтажное
радиальное биение зубчатого колеса
![]() -
допуск на погрешность, создающий
первичное радиальное биение
-
допуск на погрешность, создающий
первичное радиальное биение
![]() -
угол исходного профиля колеса
-
угол исходного профиля колеса
Примем для шестерни
![]()
для колеса
![]()
|
|
K |
F ’i 1 |
F ’i 2 |
F ’i 0 max |
|
i1-2=2,5 |
0,83 |
31 |
33 |
53.95 |
|
i3-4=4,083 |
0,96 |
31 |
39 |
68,05 |
|
i5-6=4,167 |
0,96 |
34 |
45 |
76,588 |
|
i7-8=5,833 |
0,96 |
36 |
52 |
85,143 |
Перевод погрешностей в угловые минуты
Пересчет ведется по формуле:
![]()
|
|
∆φφi 0 min |
∆φφi 0 max |
|
1-2 |
9,77’ |
15,467’ |
|
3-4 |
7,178’ |
11,944’ |
|
5-6 |
5,803’ |
10,539’ |
|
7-8 |
2,895’ |
5,978’ |
Определение
координат середины поля рассеивания
![]() и поля рассеяния
и поля рассеяния
![]()
![]()
|
|
Ei j |
Vi j |
|
1-2 |
12,618’ |
5,698’ |
|
3-4 |
9,561’ |
4,766’ |
|
5-6 |
8,171’ |
4,735’ |
|
7-8 |
4,436’ |
3,082’ |
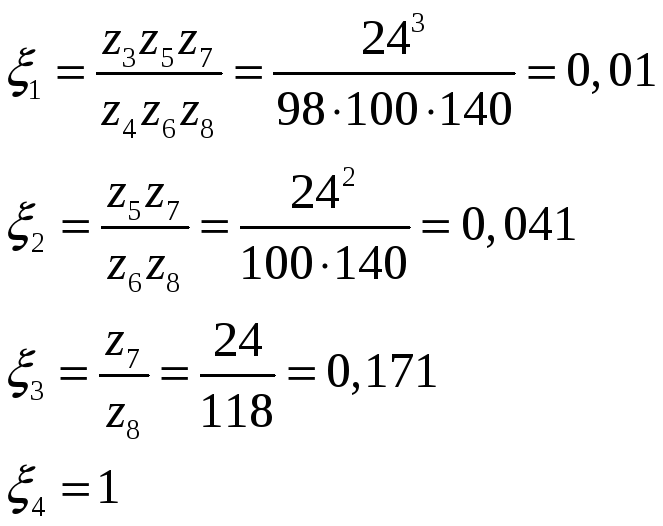
Координаты середины поля рассеивания кинематической погрешности цепи
![]() -
передаточный коэффицент j-ой
элементарной передачи
-
передаточный коэффицент j-ой
элементарной передачи
![]()
![]() -
передаточное отношение кинематической
цепи между выходными валами j-ой
передачи и привода
-
передаточное отношение кинематической
цепи между выходными валами j-ой
передачи и привода
![]()