

2.2.3. Дифференцирующие звенья
1. Идеальное дифференцирующее звено
Дифференцирующее звено может иметь идеальное и реальное представление. Выходная величина идеального дифференцирующего звена пропорциональна скорости изменения входной величины:
![]() (2.19)
(2.19)
Передаточная функция дифференцирующего звена
![]() (2.20)
(2.20)
В идеальном
дифференцирующем звене скачкообразное
изменение входной величины должно
вызвать мгновенное изменение выходной
величины от
![]() до
до
![]() и немедленный спад ее обратно до нуля.
Но практически осуществить такой закон
невозможно, т.к. все физические процессы,
протекающие в природе, инерционны.
Наконец, это противоречит закону
коммутации для электрических цепей:
и немедленный спад ее обратно до нуля.
Но практически осуществить такой закон
невозможно, т.к. все физические процессы,
протекающие в природе, инерционны.
Наконец, это противоречит закону
коммутации для электрических цепей:
![]() ,
,
где
![]() – ток индуктивности и напряжение на
емкости (соответственно) до коммутации
и после момента коммутации.
– ток индуктивности и напряжение на
емкости (соответственно) до коммутации
и после момента коммутации.
Примеры идеальных дифференцирующих звеньев изображены на рис. 2.7.
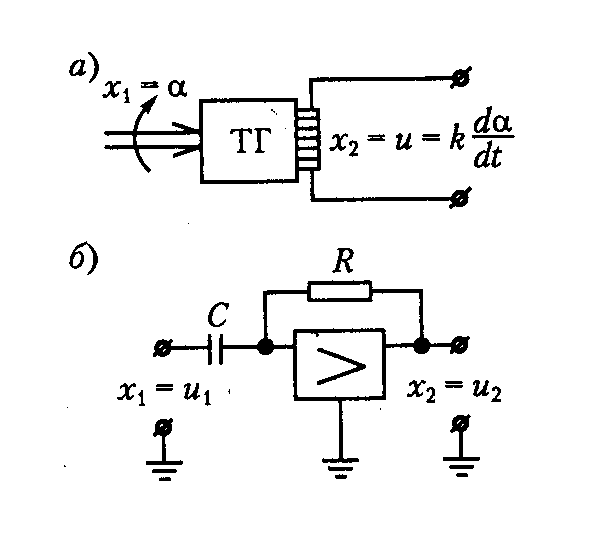
Рис. 2.7. Примеры идеальных дифференцирующих звеньев
Единственным
идеальным дифференцирующим звеном,
которое точно описывается уравнением
(2.19), является тахогенератор постоянного
тока (рис. 2.7, а), если в качестве входной
величины рассматривается угол поворота
его ротора
![]() ,
а в качестве выходной величины – ЭДС
якоря
,
а в качестве выходной величины – ЭДС
якоря
![]() .
В тахогенераторе постоянного тока при
неизменном потоке возбуждения, ЭДС в
якоре пропорциональна скорости вращения:
.
В тахогенераторе постоянного тока при
неизменном потоке возбуждения, ЭДС в
якоре пропорциональна скорости вращения:
![]() .
Скорость вращения есть производная от
угла поворота по времени:
.
Скорость вращения есть производная от
угла поворота по времени:
![]() .
Следовательно,
.
Следовательно,
![]() .
В режиме, близком к холостому ходу
(сопротивление нагрузки велико), можно
считать, что напряжение якоря равно
ЭДС:
.
В режиме, близком к холостому ходу
(сопротивление нагрузки велико), можно
считать, что напряжение якоря равно
ЭДС:
![]() .
Тогда
.
Тогда
![]() .
.
Приближенно в качестве идеального дифференцирующего звена может рассматриваться операционный усилитель в режиме дифференцирования (рис. 2.7, б).
Временные характеристики приведены в табл. 2.2, а частотные – в приложении 2.
Таблица 2.2. Временные характеристики дифференцирующих звеньев
|
Тип звена и его передаточная функция |
Переходная функция |
Функция веса |
|
Идеальное дифференцирующее
|
|
|
|
Дифференцирующее с замедлением
|
|
|



2. Дифференцирующее звено с замедлением
В качестве реального дифференцирующего звена рассмотрим дифференцирующее звено с замедлением в соответствии с примером реализации в виде пассивной электрической цепи (рис. 2.8).
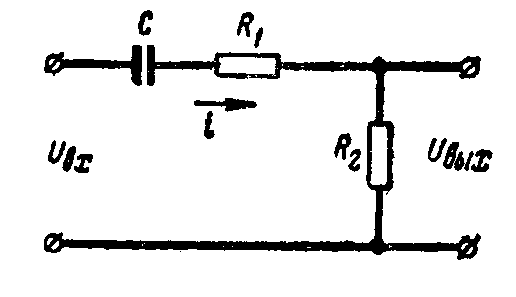
Рис. 2.8. Пример дифференцирующего звена с замедлением
Звено описывается уравнением
![]() (2.21)
(2.21)
Переходим от
оригинала к алгебраической операторной
форме, для чего производим обход по
контуру в принципиальной схеме и
получаем передаточную функцию
![]()
![]()
![]()
Передаточная функция в соответствии с принципиальной схемой звена
![]() , (2.22)
, (2.22)
где – постоянная времени и коэффициент передачи звена:
![]() ;
;
![]() ;
;
Находим изображение выходной величины как реакцию на ступенчатое входное воздействие
![]()
иначе по таблицам Лапласа (приложение 1) находим:
![]() .
(2.23)
.
(2.23)
Если в данном
выражение пренебречь постоянной времени
![]() ,
которая практически значительно меньше
постоянной времени
,
которая практически значительно меньше
постоянной времени
![]() ,
то равенство (2.23) можно переписать в
обычно принятом виде:
,
то равенство (2.23) можно переписать в
обычно принятом виде:
![]() .
.
Амплитудно-частотная
характеристика имеет иной вид, чем у
идеального звена. Характеристики
совпадают в области низких частот. В
области высоких частот реальное звено
пропускает сигнал хуже, чем идеальное
звено. Коэффициент передачи стремится
к значению
![]() .
Для звеньев, представляющих собой
.
Для звеньев, представляющих собой
![]() или
или
![]() -
цепи,
-
цепи,
![]() ,
и на высоких частотах коэффициент
передачи стремится к единице.
,
и на высоких частотах коэффициент
передачи стремится к единице.
Фазовые сдвиги,
вносимые звеном, являются наибольшими
при низких частотах. На высоких частотах
фазовый сдвиг постепенно уменьшается,
стремясь в пределе к нулю при
![]() .
Здесь также видно, что это звено ведет
себя подобно идеальному только в области
низких частот.
.
Здесь также видно, что это звено ведет
себя подобно идеальному только в области
низких частот.
ЛАХ звена строится по выражению
![]() (2.24)
(2.24)
Асимптотическая
ЛАХ может быть представлена в виде двух
прямых. Одна из них имеет положительный
наклон 20 дБ/дек (при
![]() ),
а другая – параллельна оси частот (при
),
а другая – параллельна оси частот (при
![]() ).
).