

2.2.4. Инерционное звено первого порядка (апериодическое)
Инерционному звену первого порядка соответствует дифференциальное уравнение
![]() (2.25)
(2.25)
В операторной форме:
![]() .
.
Передаточная функция инерционного звена первого порядка
![]() .
(2.26)
.
(2.26)
Определим характер
изменения выходной величины при подаче
на вход в виде ступенчатого воздействия
входной величины
![]() .
.
Дифференциальное уравнение (2.30) достаточно просто решается обычным методом. Однако в качестве примера найдем его решение через передаточную функцию звена.
По таблицам преобразования Лапласа (приложение 1) находим изображение входной величины:
![]() .
.
Изображение выходной величины равно:
![]() ,
,
Выражаем оригинал
функции
![]() через ее изображение (производим
обратное преобразование), вынося
постоянную величину за знак преобразования
Лапласа:
через ее изображение (производим
обратное преобразование), вынося
постоянную величину за знак преобразования
Лапласа:
 .
.
Полагая
![]() ,
по таблицам преобразования Лапласа
(приложение 1) находим:
,
по таблицам преобразования Лапласа
(приложение 1) находим:
![]() . (2.27)
. (2.27)
Переходный процесс инерционного звена первого порядка представлен на рис. 2.9.
Кривые переходных процессов имеют вид экспонент
В качестве первого примера можно рассмотреть двигатель любого типа (электрический, гидравлический, пневматический и т.д.), механические характеристики которого (зависимость вращающего момента от скорости) могут быть представлены в виде параллельных прямых (рис. 2.10).
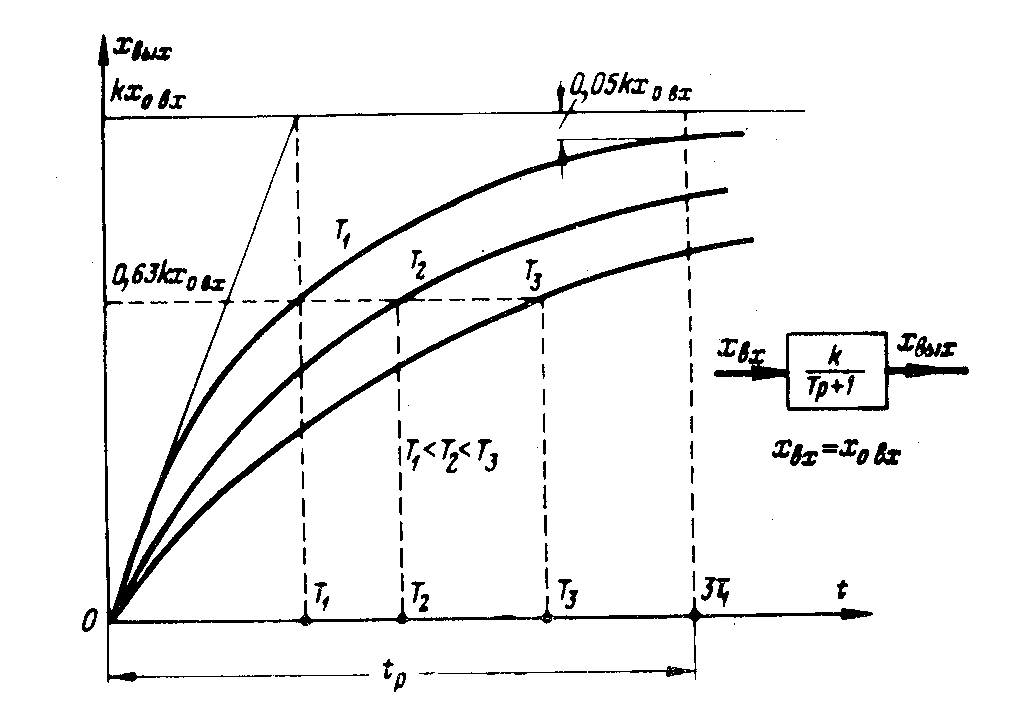
Рис. 2.9. Передаточная функция и переходные процессы инерционного звена первого порядка (апериодического) при различных значениях постоянной времени
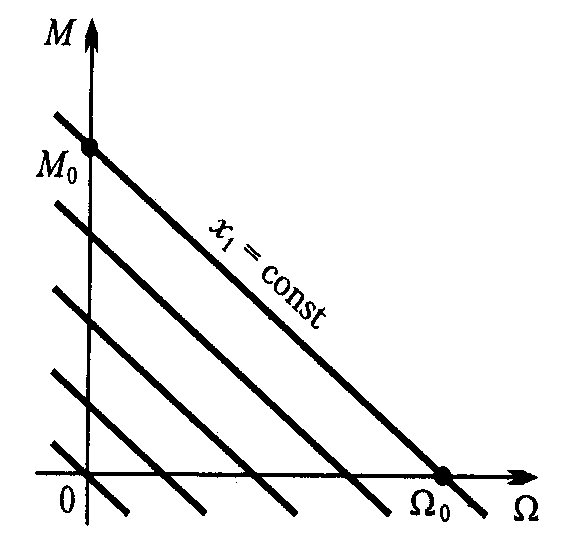
Рис. 2.10. Механические характеристики двигателя
Входной величиной
![]() здесь является управляющее воздействие
в двигателе, например подводимое
напряжение в электрическом двигателе,
расход жидкости в гидравлическом
двигателе и т.п. Выходной величиной
является скорость вращения
здесь является управляющее воздействие
в двигателе, например подводимое
напряжение в электрическом двигателе,
расход жидкости в гидравлическом
двигателе и т.п. Выходной величиной
является скорость вращения
![]() .
Дифференциальное уравнение движения
при равенстве нулю момента нагрузки
может быть представлено в виде:
.
Дифференциальное уравнение движения
при равенстве нулю момента нагрузки
может быть представлено в виде:
![]()
где
![]() – приведенный к валу двигателя суммарный
момент инерции;
– приведенный к валу двигателя суммарный
момент инерции;
![]() – коэффициент пропорциональности
между управляющим воздействием
– коэффициент пропорциональности
между управляющим воздействием
![]() и вращающим моментом;
и вращающим моментом;
![]() – наклон механической характеристики,
равный отношению пускового момент к
скорости холостого хода при некотором
значении управляющего воздействия.
– наклон механической характеристики,
равный отношению пускового момент к
скорости холостого хода при некотором
значении управляющего воздействия.
Это уравнение приводится к виду:
![]() ,
,
и полностью совпадает с (2.25),
где
![]() – коэффициент передачи звена,
– коэффициент передачи звена,
![]() – постоянная времени двигателя.
– постоянная времени двигателя.
На рис. 2.11 приведены примеры реализации инерционных звеньев первого порядка как пассивных электрических цепей.

Рис. 2.11 Примеры реализации инерционного звена первого порядка в виде электрических цепей
Входной величиной
этих звеньев является напряжение
![]() ,
а выходной – напряжение
,
а выходной – напряжение
![]() .
.
Согласно второму закону Кирхгофа для электрической цепи (рис. 2.11, а) можно записать:
![]() ,
,
откуда
 .
.
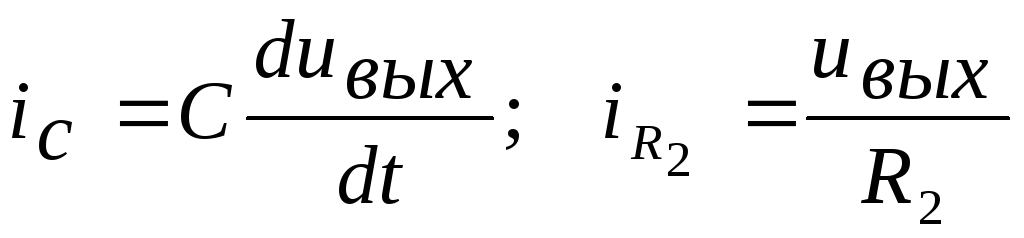
По первому закону Кирхгофа
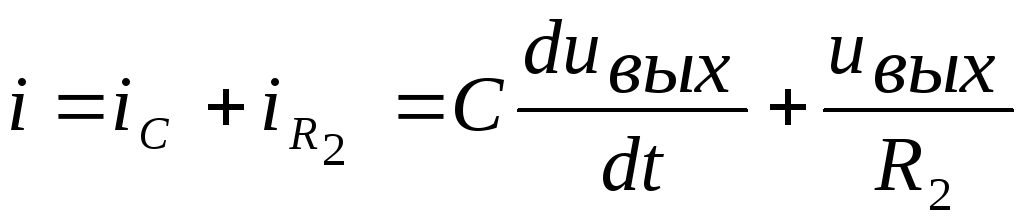 .
.
Подставив значение
![]() в выражение для
в выражение для
![]() ,
получим:
,
получим:
![]() .
.
Преобразовав дифференциальное уравнение по Лапласу, получим следующую алгебраическую форму:
![]() ,
,
откуда находим передаточную функцию звена
![]() ,
,
где
![]() .
.
Таким образом, электрическая цепь, изображенная на рис. 2.11, а, является инерционным звеном первого порядка (апериодическим звеном).
Коэффициент
передачи звена регулируется величинами
сопротивлений
![]() и
и
![]() ,
при этом пропорционально коэффициенту
передачи изменяется и постоянная
времени.
,
при этом пропорционально коэффициенту
передачи изменяется и постоянная
времени.
При
![]() получаем электрическую цепь (рис. 2.11,
б), коэффициент передачи, постоянная
времени и передаточная функция которой
в этом случае будут равны:
получаем электрическую цепь (рис. 2.11,
б), коэффициент передачи, постоянная
времени и передаточная функция которой
в этом случае будут равны:
![]() .
.
Электрическая цепь, представленная на рис. 2.11, б, является апериодическим звеном с коэффициентом передачи, равным единице.